Autonomous Navigation for High-Speed Ground Robot
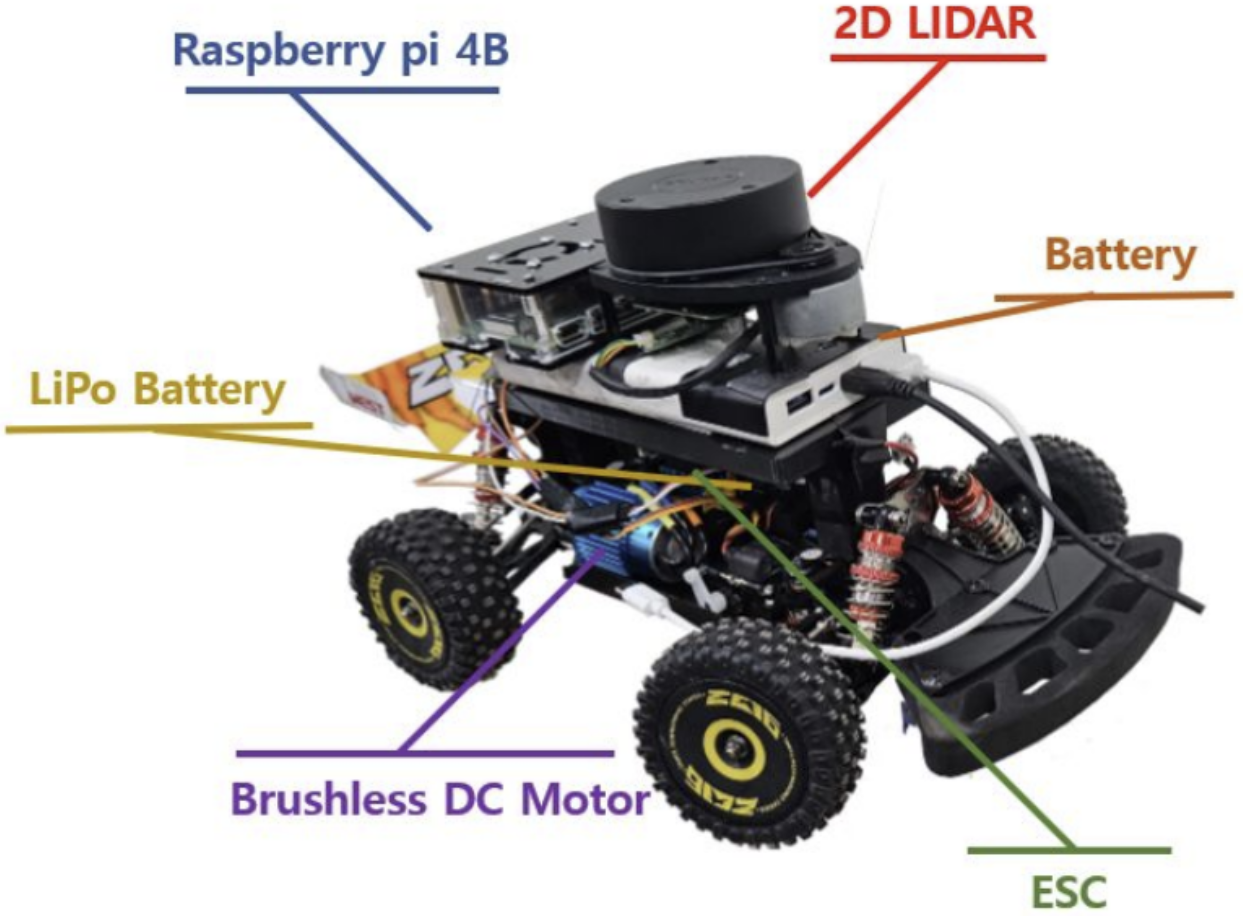
In my undergraduate thesis, I led the software development of an agile autonomous navigation system based on scene understanding, without relying on traditional Simultaneous Localization and Mapping (SLAM). Our approach combined local path planning with path integration, allowing navigation toward the goal while avoiding obstacles. As a testing robot, we mounted a 2D LiDAR on a remote-controlled model car. I created an algorithm for line detection and obstacle clustering from the laser scan. This simple scene understanding facilitated the computation of optimal paths with reduced computational demands. I also elaborated a path integration algorithm by adopting an equation correlating the car's steering angle with the rotation radius. As a result, our robot reached a maximum speed of 5m/s.