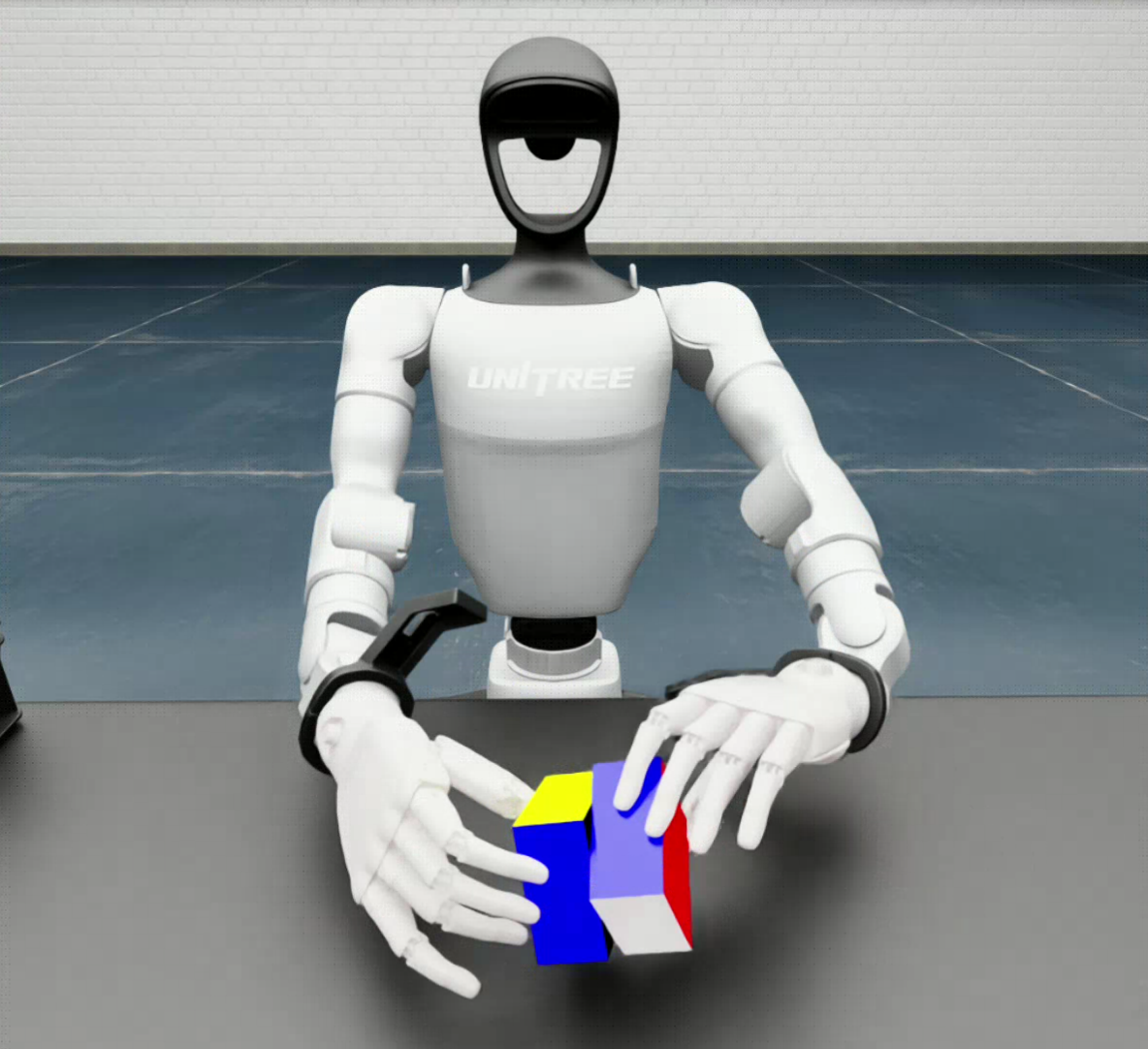
Solving Rubik's Cube with Bimanual Robot Hands
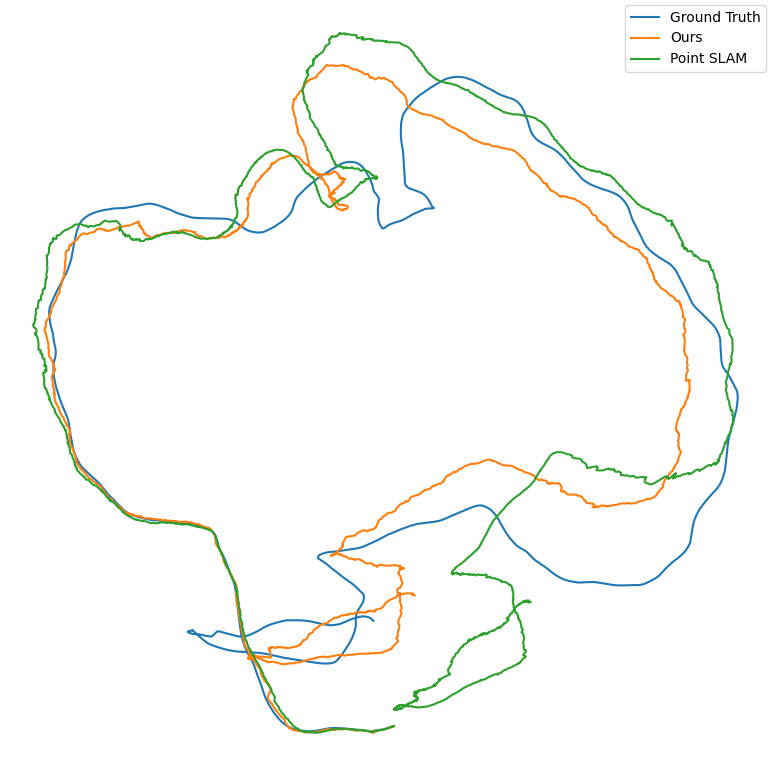
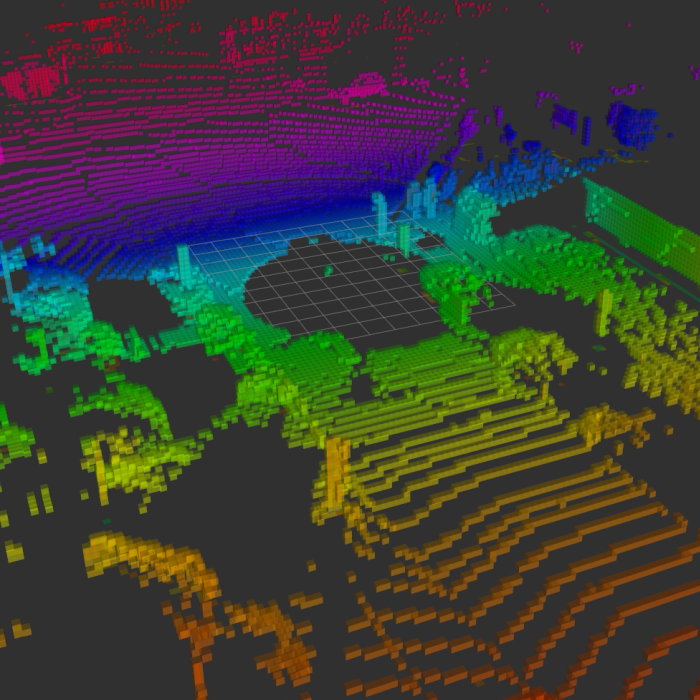
Neural SLAM with Point Cloud Projection for Faster RGB-D Tracking
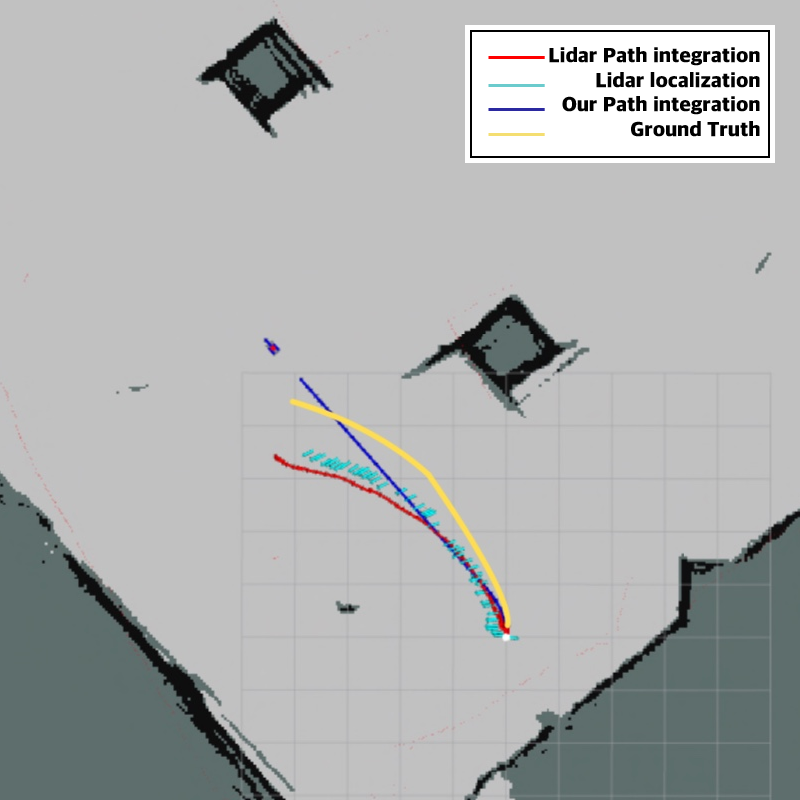
Height-embedded Iterative Closest Point (ICP)
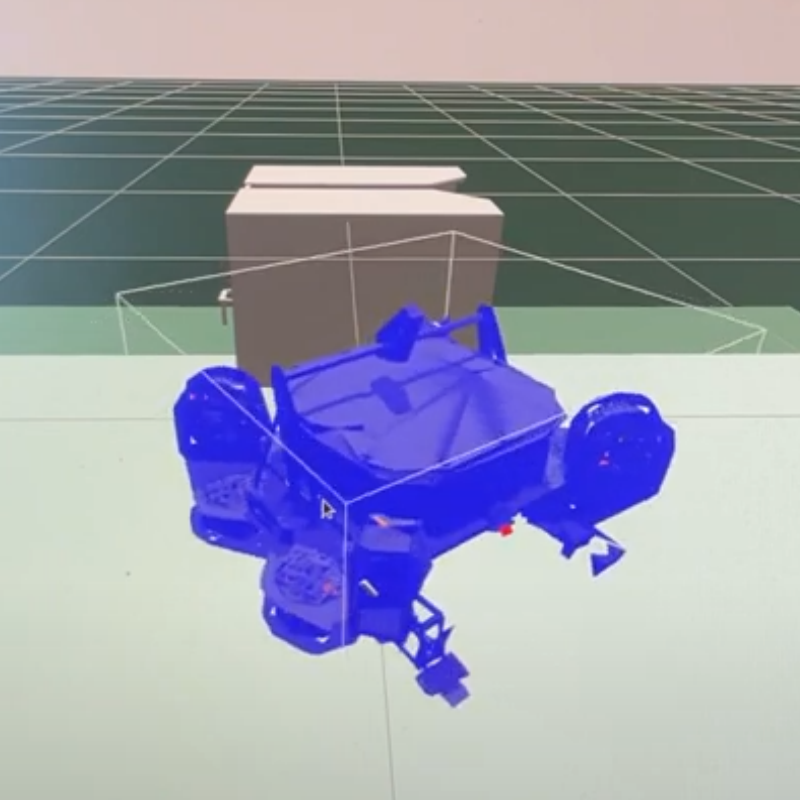
Isaac Sim Environment for Heterogeneous Multi-Robot Systems
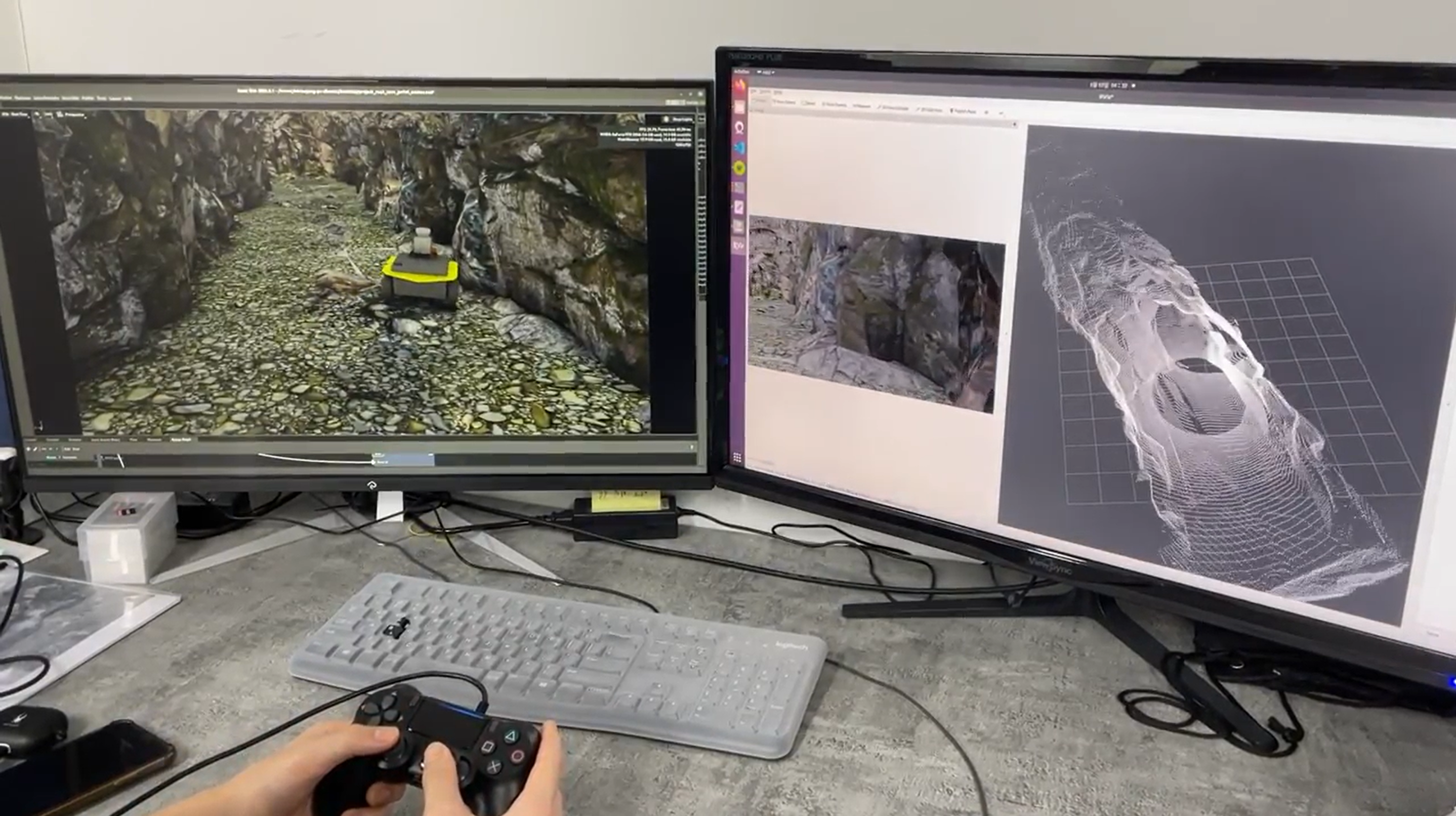
Autonomous Navigation for High-Speed Ground Robot
Underwater ROV Simulation