Introduction
Bundle Adjustment (BA) can provide accurate estimation of camera pose as well as sparse 3D map. However, it is generally computationally too expensive to run in real-time. This paper proposes a few conditions of BA to achieve real-time performance:
- BA must use keyframes, which are "important" frames that are selected based on some criteria, instead of all frames, to reduce the number of frames to be processed.
- As the number of keyframes increases, keyframe selection should exclude redundancy.
- Keyframes must be spatially well-spreaded to provide significant parallex and plenty of loop closure matches.
- Initial estimation of the keyframe pose and point coordinates should be provided.
- Local map, which is a subset of the global map, should be the focus of optimization to achieve scalability.
- BA must have the ability to perform fast global optimizations to close loops in real-time.
The main contributions of this system are:
- Use of the same ORB features for all three tasks: tracking, mapping, and loop closing, which simplifies the system.
- Real time operation in large environments, which is achieved by the use of Covisibility Graph.
- Real time loop closing by using Essential Graph. The Essential Graph is a subset of the Covisibility Graph.
- Real time camera relocalization
- Automatic and robust initialization, achieved by the selective keyframe strategy and robust heuristics.
- A survival of the fittest approach, that is generous in the spawning of keyframes but very restrictive in the cullimng of redundant keyframes.
System Overview
A. Three Threads: Tracking, Local Mapping, and Loop Closing
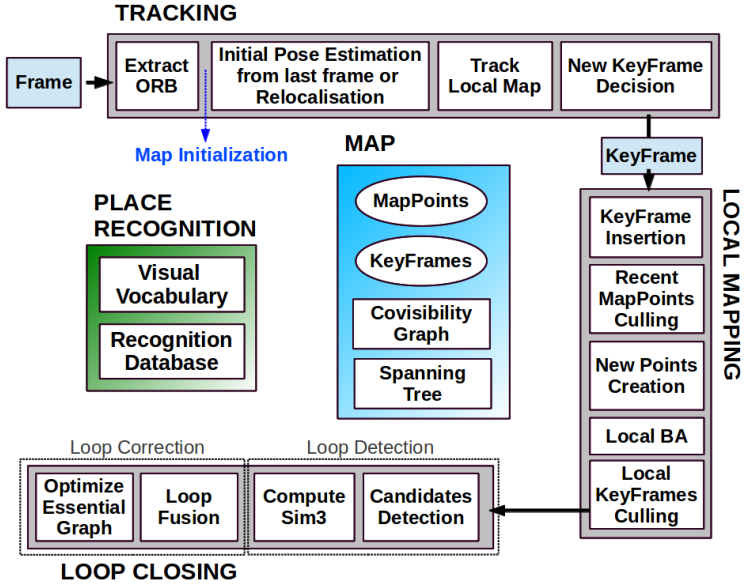
The ORB-SLAM system consists of three parallel threads: Tracking, Local Mapping, and Loop Closing. The tracking is in charge of localizing the camera with every frame in real-time. If the tracking is lost, the place recognition module is activated and a global relocalization is performed. Moreover, the tracking thread is responsible for creating new keyframes.
The Local Mapping thread is responsible for creating and optimizing the local map. The local map is a subset of the global map around the camera pose. Newly inserted keyframes are added to the Covisibility Graph. The Local Mapping thread is also responsible for culling redundant keyframes and map points.
The Loop Closing thread searches for loops with every new keyframe. If a loop is detected, the Loop Closing thread first compute a similarity transformation to correct the drift, and performs a pose graph optimization of the map to achieve consistency. The optimization is performed in the Essential Graph, which is a sparser subgraph of the Covisibility Graph.
B. Map Points and Keyframes
Each map point $p_i$ stores:
- 3D position $\mathbf{X}_{w,i}$ in the world coordinate system.
- Viewing direction $\mathbf{n}_i$ in the world coordinate system, which is the normalized vector from the camera center to the map point.
- ORB Descriptor $\mathbf{D}_i$ for matching.
- The maximum $d_\text{max}$ and minimum $d_\text{min}$ distance from the camera center to the map point, at which the map point can be observed. This is obtained by the scale invariance limits of the ORB features.
Each keyframe $K_i$ stores:
- Camera pose $\mathbf{T}_{iw}$, from world to camera coordinate system.
- Camera intrinsics $K$.
- All the ORB features extracted in the keyframe.
C. Covisibility Graph and Essential Graph
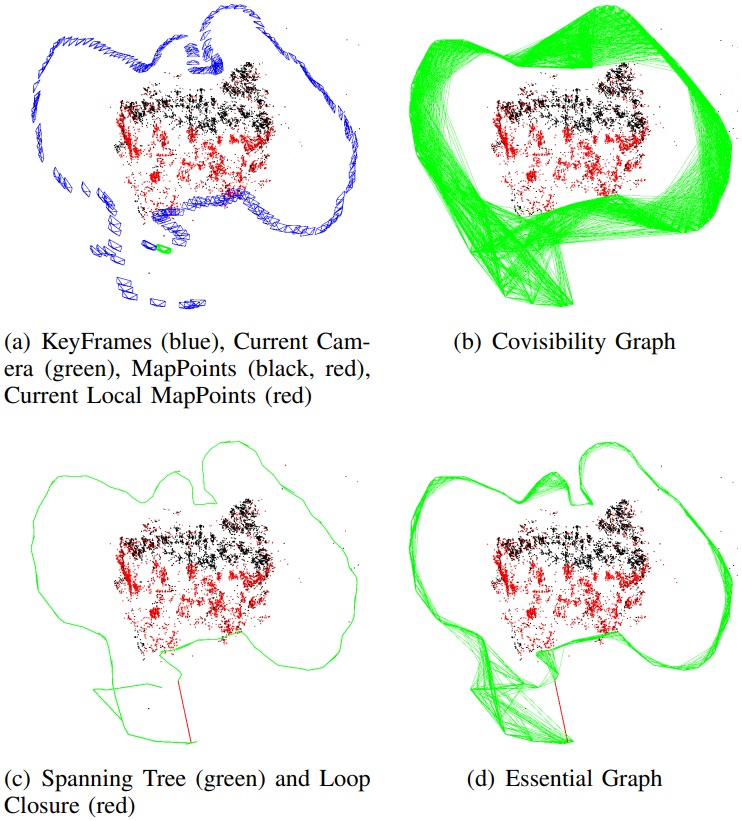
The Covisibility Graph is an undirected weighted graph where each node is a keyframe and each edge represents that two keyframes have enough common map points. The weight of the ege is the number of common map points.
The Essential Graph is a spanning tree of the Covisibility Graph, which contains all the nodes of the Covisibility Graph, but only a subset of the edges. The Essential Graph is used for pose graph optimization. This enables an efficient loop closing while preserving a strong network of keyframes.
D. Bags of Words Place Recognition
The system has embedded a bags of word module based on DBoW2 to perform loop detection and relocalization. This is a database of ORB descriptors of the keyframes, from which the system can retrieve the most similar keyframes to the keyframe we want.
Automatic Map Initialization
Now let's take a look at the very first stage of the system, the automatic map initialization. The system needs the map for the following tasks (tracking, loop closing, and relocalization) to be processed.
The goal of the map initialization is to compute the relative pose between two frames to triangulate an initial set of map points.
To make this process automatic and robust at the same time, the system adopts both planar and non-planar assumtion for the scene in the image. The planar model uses homography, and the non-planar model uses the fundamental matrix to calculate the transformation.
$\mathbf{x}_c = \mathbf{H}_{cr}\mathbf{x}_r \quad \quad \mathbf{x}_c^T\mathbf{F}_{cr}\mathbf{x}_r = 0$
The left equation above is the planar model using homography, and the right equation is the non-planar model using the fundamental matrix. RANSAC is used to estimate the transformation.
The system then measures the errors of each model by using symmetric transfer errors. Let $S_H$ and $S_F$ be the error term of the planar and non-planar model, respectively. The system then computes the most reliable model by the following heuristics:
$R_H = \cfrac{S_H}{S_H + S_F}$
If $R_H$ is greater than 0.45, the system selects the planar model. Otherwise, the system selects the non-planar model. This way, the system can adopt planar model when there is low parallex, and non-planar model when there is enough parallex.
Tracking
Tracking is the process of estimating the camera pose with every incoming frame. There are several steps in the tracking process.
A. ORB Extraction
First, the system extracts ORB features from the frame. The number of features is either 1000 or 2000, depending on the image size.
B. Initial Pose Estimation from Previous Frame
The system uses a constant velocity motion model to predict the camera pose before calculating everything. The system then searches for the ORB features in the current frame that matches the features in the previous frame, based on that prediction. If not enough matches are found, the system uses the wider search for the matching features. The pose is then fine-tuned with the found matches.
C. Initial Pose Estimation via Global Relocalization
If the tracking is lost, the system converts the frame into bag of words, and searches for the most similar keyframe in the database. The system then takes the matched features between the current frame and the similar keyframe to estimate the camera pose. PnP algorithm is used here, which is a 3D-2D pose estimation algorithm.
D. Track Local Map
In this step, the system tries to find more matching points between the local map and the current frame based on the estimated camera pose. If a match is found, the system refines the camera pose with the found matches.
E. New Keyframe Decision
There are four conditions to decide whether the current frame should be a new keyframe:
- More than 20 frames must have passed from the last global relocalization.
- Local mapping is idle, or more than 20 frames have passed from last keyframe insertion.
- Current frame tracks at least 50 points.
- Current frame tracks less than 90% points than $K_{\text{ref}}$.
Here, the system focused on inserting keyframes as fast as possible to handle challenging movements such as pure rotations. Instead of enforcing loose constraints on the keyframe insertion, the system is very restrictive in culling redundant keyframes in the local mapping thread.
Local Mapping
Local Mapping is the process of creating and optimizing the local map. The local map is a subset of the global map around the camera pose and is used for tracking, loop closing, and relocalization, making the system scalable. The procedure below is executed in every keyframe insertion.
A. Keyframe Insertion
First, the system updates the covisibility graph. It adds a new node for the keyframe and updates the edges. Based on the updated covisibility graph, the essential graph is updated as well. The new keyframe is connected to the keyframe with most points in common.
B. Recent Map Points Culling
The system culls the map points that does not fulfill the conditions below during the first three keyframes after creation. This is to ensure that the map points are trackable and not wrongly triangulated.
- The tracking must find the point in more than the 25% of the frames in which it is predicted to be visible.
- If more than one keyframe has passed from map point creation, it must be observed from at least three keyframes.
C. New Map Point Creation
The system creates new map points by triangulating the matched features between the current keyframe and the connected keyframes in the covisibility graph. For unmatched ORB features in the current keyframe, the system tries once again to find the corresponding points using the bags of words.
D. Local Bundle Adjustment
The local BA optimizes the currently processed keyframe $K_i$, all the keyframes connected to it in the covisibility graph $K_c$, and all the map points seen by those keyframes.
E. Local Keyframe Culling
The system detects and culls redundant keyframes. A keyframe whose 90% of the map points have been seen in at least other three keyframes in the same or finer scale will be discarded.
Loop Closing
Loop Closing is the process of detecting and correcting the drift in the map. This stage is imperative to maintain the consistency and reduce the drift in the map. This thread is executed in every keyframe insertion.
A. Loop Candidates Detection
The system first searches for the loop candidates using the bag of words database. Here, the keyframes directly connected to the current keyframe are excluded from the candidates. There can be several loop candidates if there are several places with similar appearance to $K_i$.
B. Compute the Similarity Transformation
Calculating the similarity transformation between the current keyframe and the loop candidate informs us about the accumulated drift. Since we have 3D map points for both keyframes and their correspondences, RANSAC can be used to estimate the transformation. If that transformation is supported by enough inliers, the loop is accepted.
C. Loop Fusion
The first step in the loop correction is to fuse duplicated map points and insert new edges in the covisibility graph that will attach the loop closure. The current keyframe, the loop candidate, and their neighbors are investigated to find the duplicated map points. The duplicated map points are then fused into one map point, and the covisibility graph edges are updated accordingly.
D. Essential Graph Optimization
To complete the loop closing, the system performs a pose graph optimization over the essential graph. The goal here is to distribute the loop closing error along the graph to achieve global consistency.
Experiments
The system was tested on various datasets, including the KITTI dataset, the TUM RGB-D dataset, and the NewCollege dataset.
A. System Performance
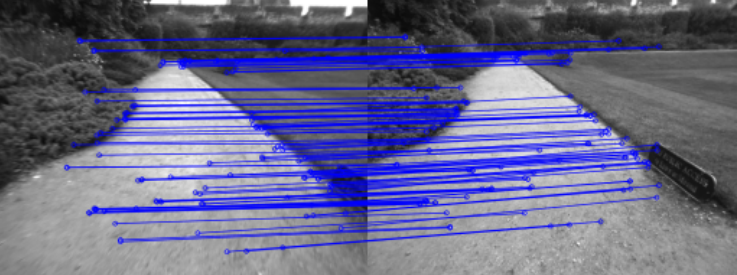
The figure above shows the loop detection results on the NewCollege dataset. The system successfully detected two keyframes and the inlier correspondences.
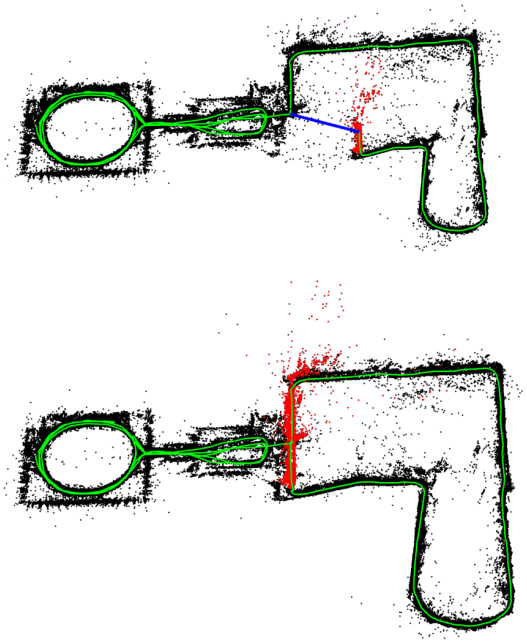
The figure above shows the map correction before and after the loop closing. The local map is indicated by the red points.
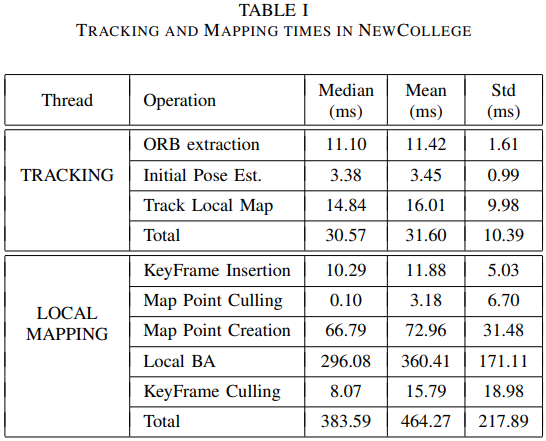
The table above shows the results for the tracking and the local mapping. The most demanding task in the tracking thread is tracking local map, and the most demanding task in the local mapping thread is local BA.
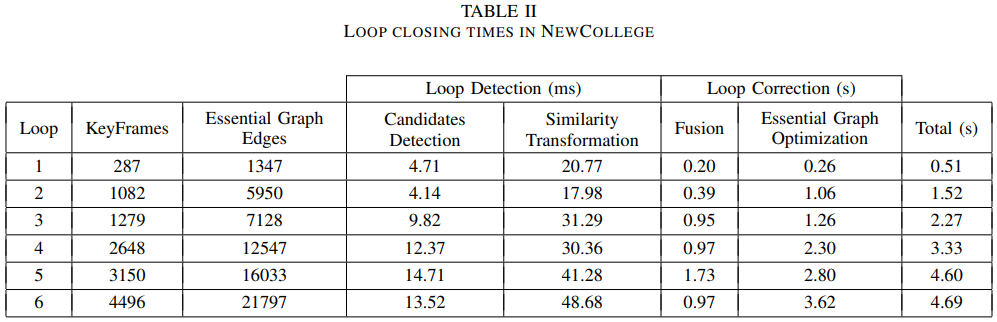
The table above shows the 6 loop closing times. The time used for the loop closing does not grow linearly with the number of keyframes. This shows the efficiency of the bags of words database, which only compares the subset of images with words in common. Moreover, the essential graph includes edges around 5 times the number of keyframes, which means it is a quite sparse graph.
B. Localization Accuracy
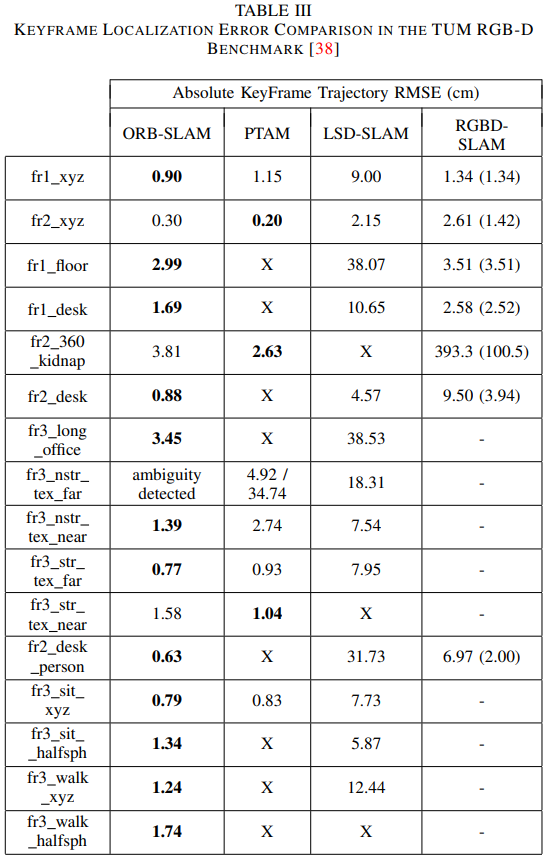
ORB-SLAM achieves higher accuracy compared to PTAM and LSD-SLAM. The system is also more robust to false initialization, where PTAM struggles. In terms of accuracy, ORB-SLAM and PTAM are similar in open trajectories, while ORB-SLAM achieves higher accuracy when detecting large loops.
C. Relocalization
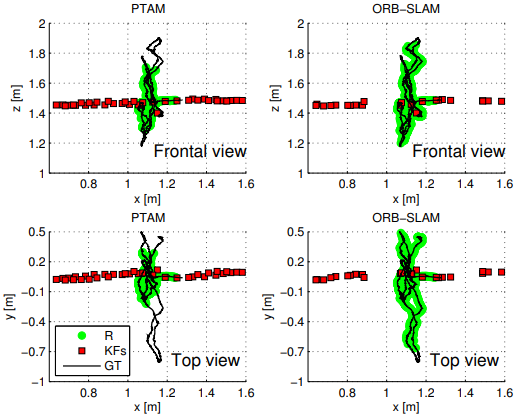
The figure above shows the results for two relocalization experiments. In the first experiment, the map was built with the first 30 seconds of the sequence, and the global relocalization was performed for each of the frame in the rest of the sequence. In the second experiment, the map was built with the sequence which was filmed by a person sitting on a chair. Then the global relocalization is performed for another sequence which was filmed in the same environment but by a person walking around.
In both experiments, ORB-SLAM successfully relocalized the frames in the map, exceeding the performance of PTAM. This proves the invariance of ORB-SLAM's relocalization method.
D. Lifelong Experiment
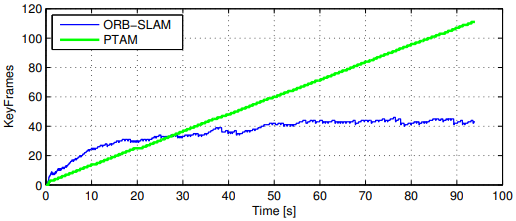
The figure above shows the number of keyframes over time, for both ORB-SLAM and PTAM. The sequence used here is a custom video, where the camera is looking at the same desk for the whole time but changing its viewpoint by moving around. ORB-SLAM keeps the number of keyframes at a certain level once there are enough keyframes to represent the whole desk. PTAM, on the other hand, keeps adding keyframes as the camera moves around the desk.
This lifelong experiment shows that the map grows with the content of the scene but not with the time.
E. Large Scale and Large Loop Closing
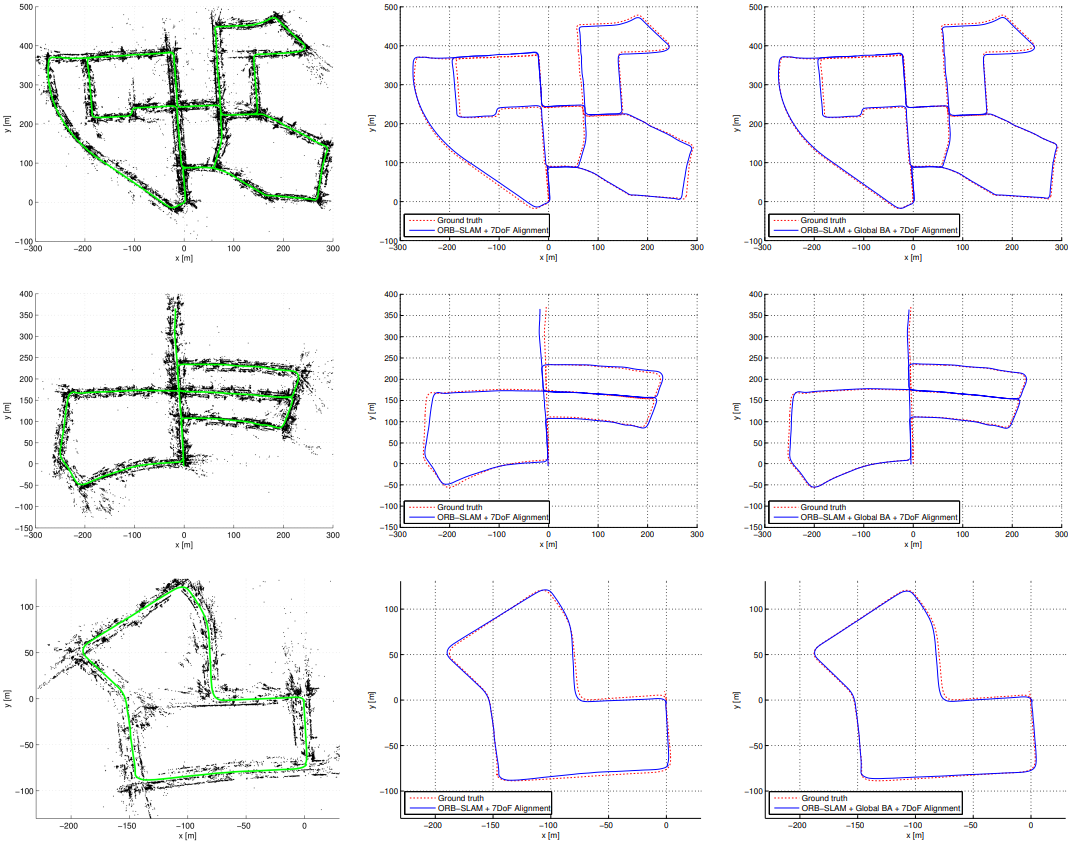
The system was tested on the KITTI dataset. The system shows high accuracy, with errors typically around 1% of its dimensions.
F. Loop Closing Strategies
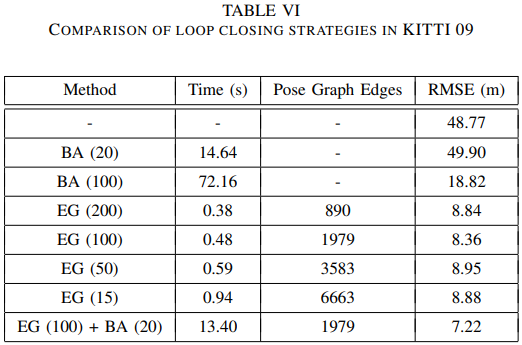
Lastly, the table above compares the loop closing performances between full bundle adjustment and essential graph optimization. Using essential graph significantly reduces the time spent for loop closing.
Conclusions and Discussion
Conclusions
ORB-SLAM can handle sequences from various environments and various agents holding the camera, e.g. car, robot, and human. Still, its accuracy is high, being less than 1cm in indoor scenes, and few meters in outdoor scenes.
Bundle Adjustment is the gold standard method for Structure From Motion, but ORB-SLAM is the first system that can run BA in real-time. ORB-SLAM's novelty for this is the policy for spawning and culling keyframes. This allowed the system to run BA more efficiently, to be robust in challenging movements, and to operate lifelong.
B. Future Work
The accuracy of our system can still be improved incorporating points at infinity in the tracking. These "vanishing points" are very informative of the rotation of the camera.
Another open way is to upgrade the sparse map to a denser reconstruction. ORB-SLAM sparse map can be a good initial guess and skeleton for a dense and detailed map.