1. Abstract
- CNN-predicted depth maps -> Fused with depths from direct monocular SLAM
- Use depth prediction for estimating absolute scale
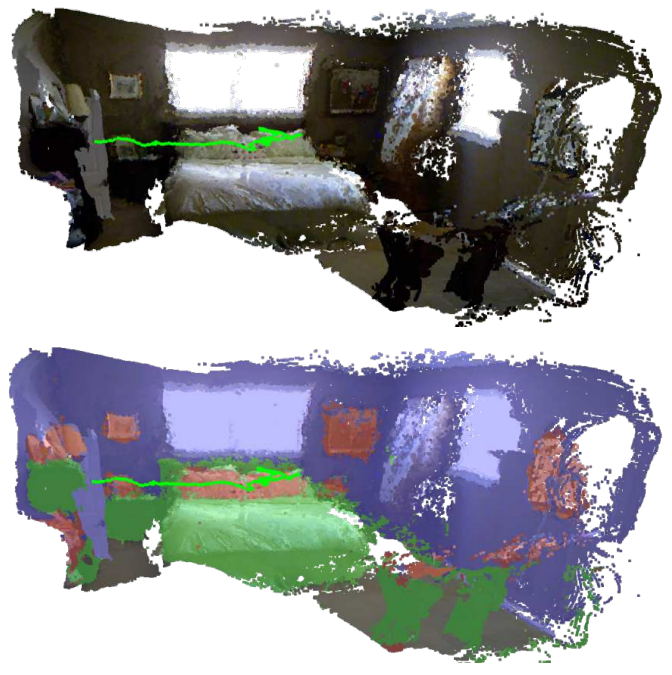
- Fusee semantic labels with dense SLAM -> Semantic scene reconstruction
2. Introduction
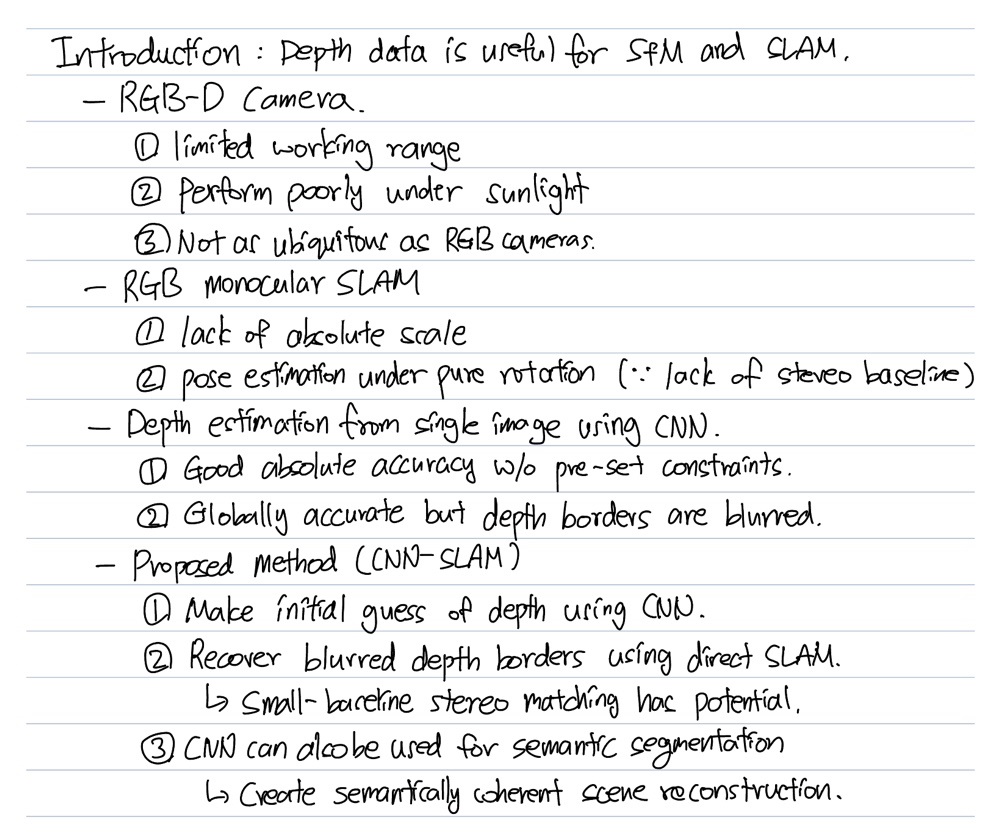
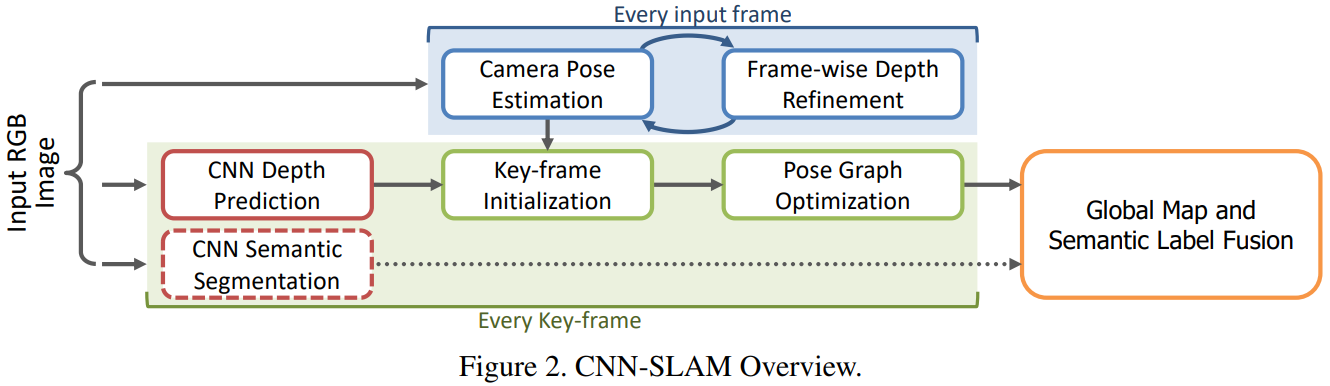
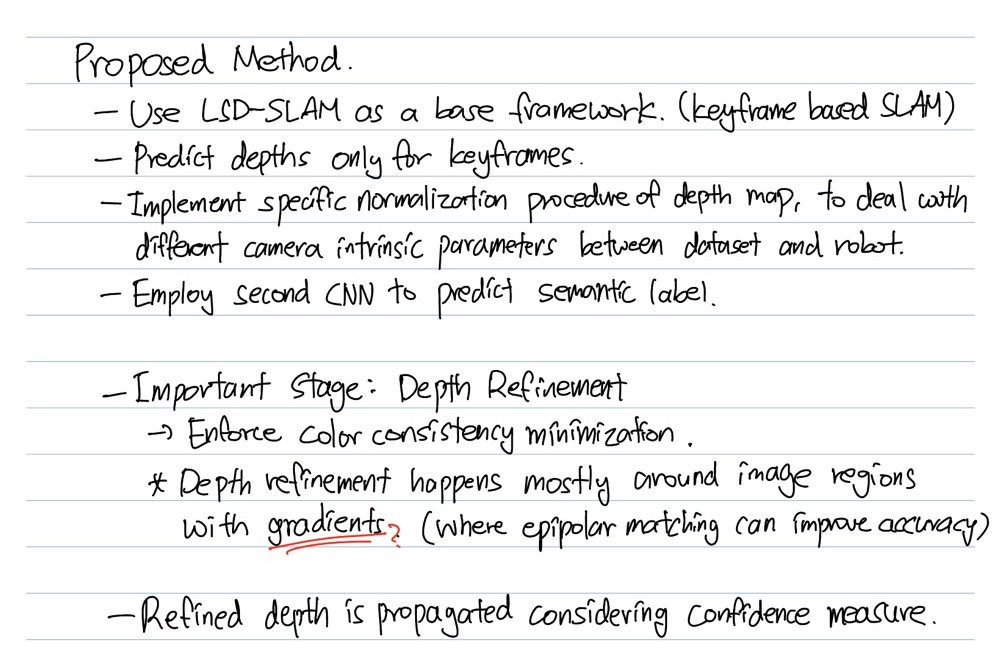
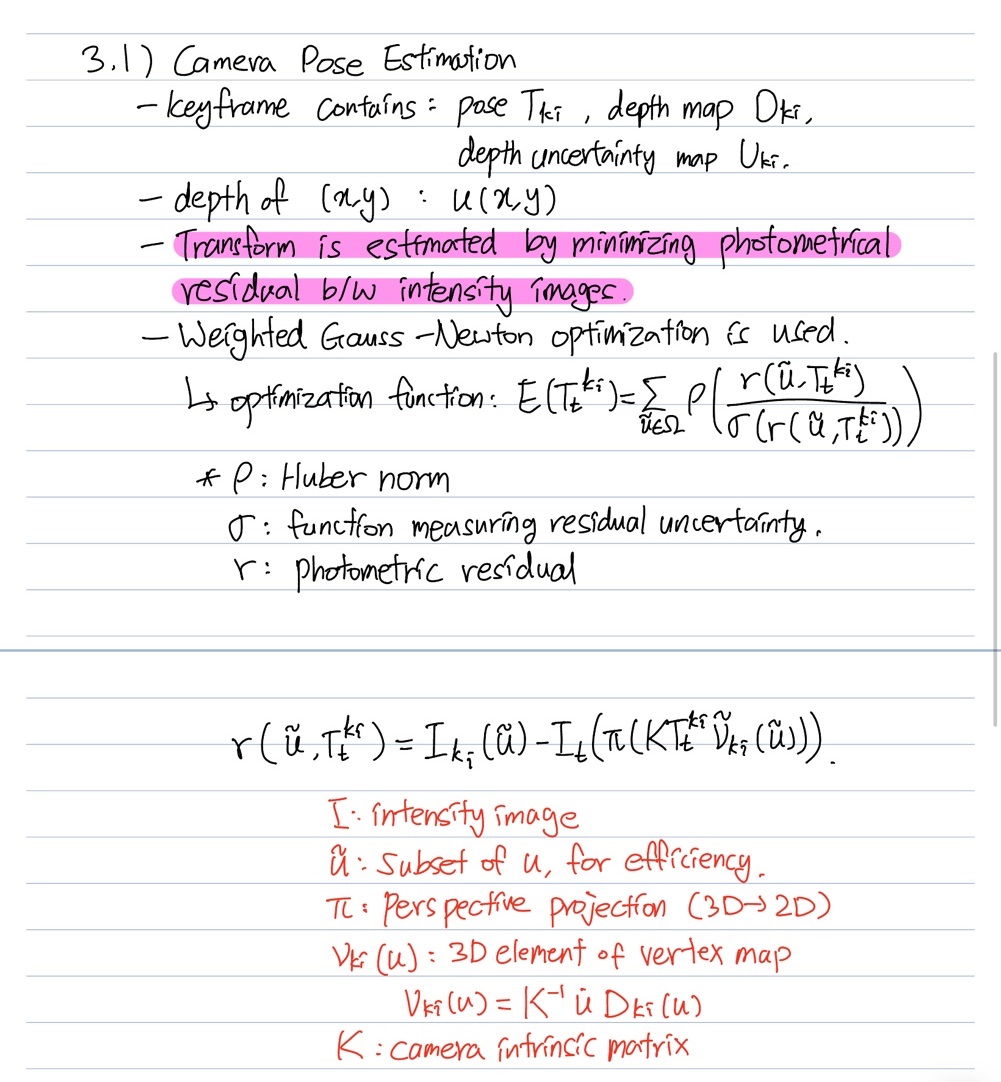
3. Proposed Method