1. Objective
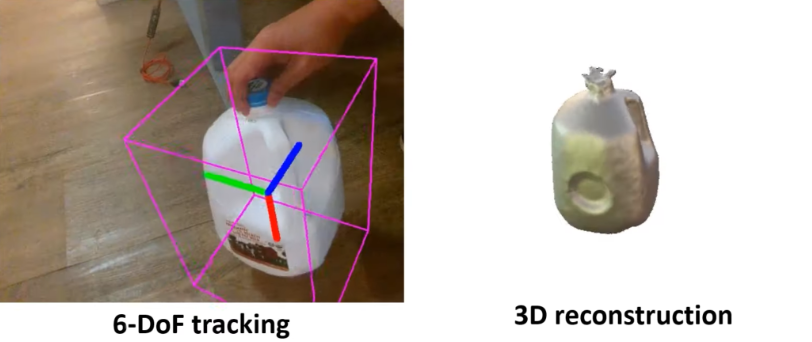
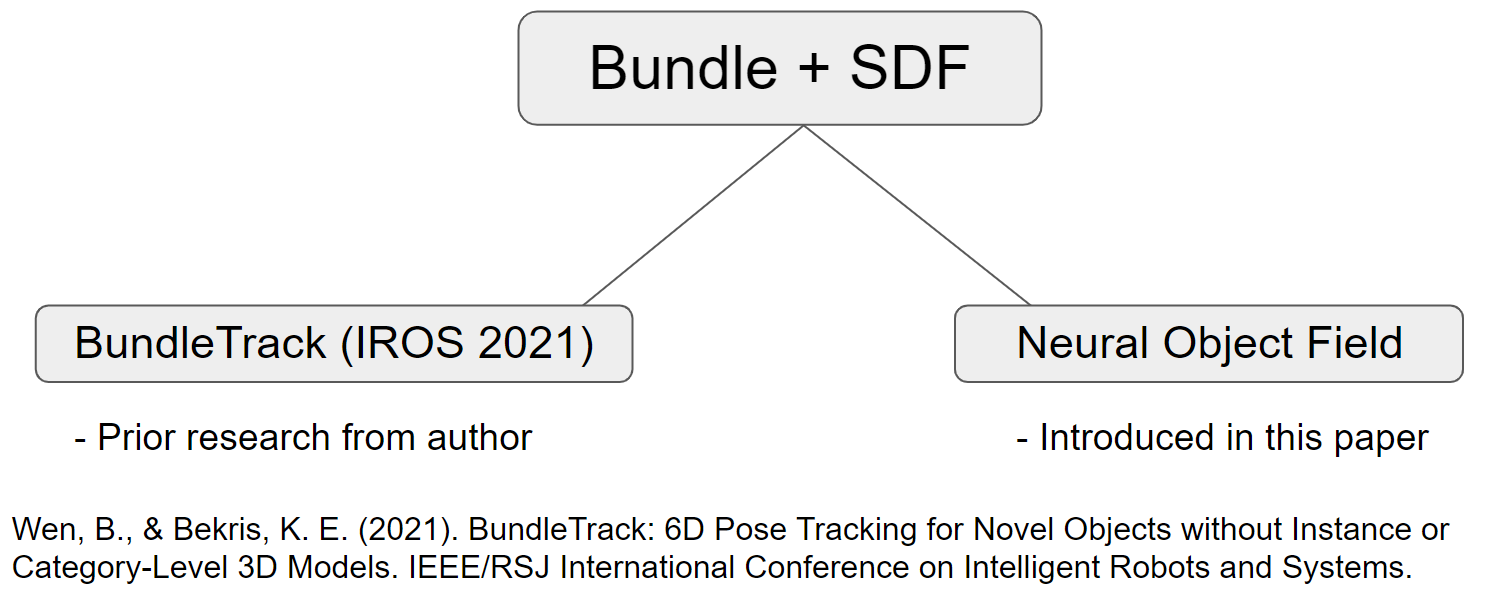
BundleSDF: Neural 6-DoF Tracking and 3D Reconstruction of Unknown Objects
DemoWhy selected BundleSDF?
- Near real-time (10Hz)
- Lightweight neural implicit model "Neural Object Field"
- Novel unknown dynamic object
How about map building with the idea of BundleSDF?
Settings of BundleSDF
- Use RGBD camera
- Assume rigid object
- Require object segmentation mask for the first frame
2. Approach
2.1. Pose Tracking
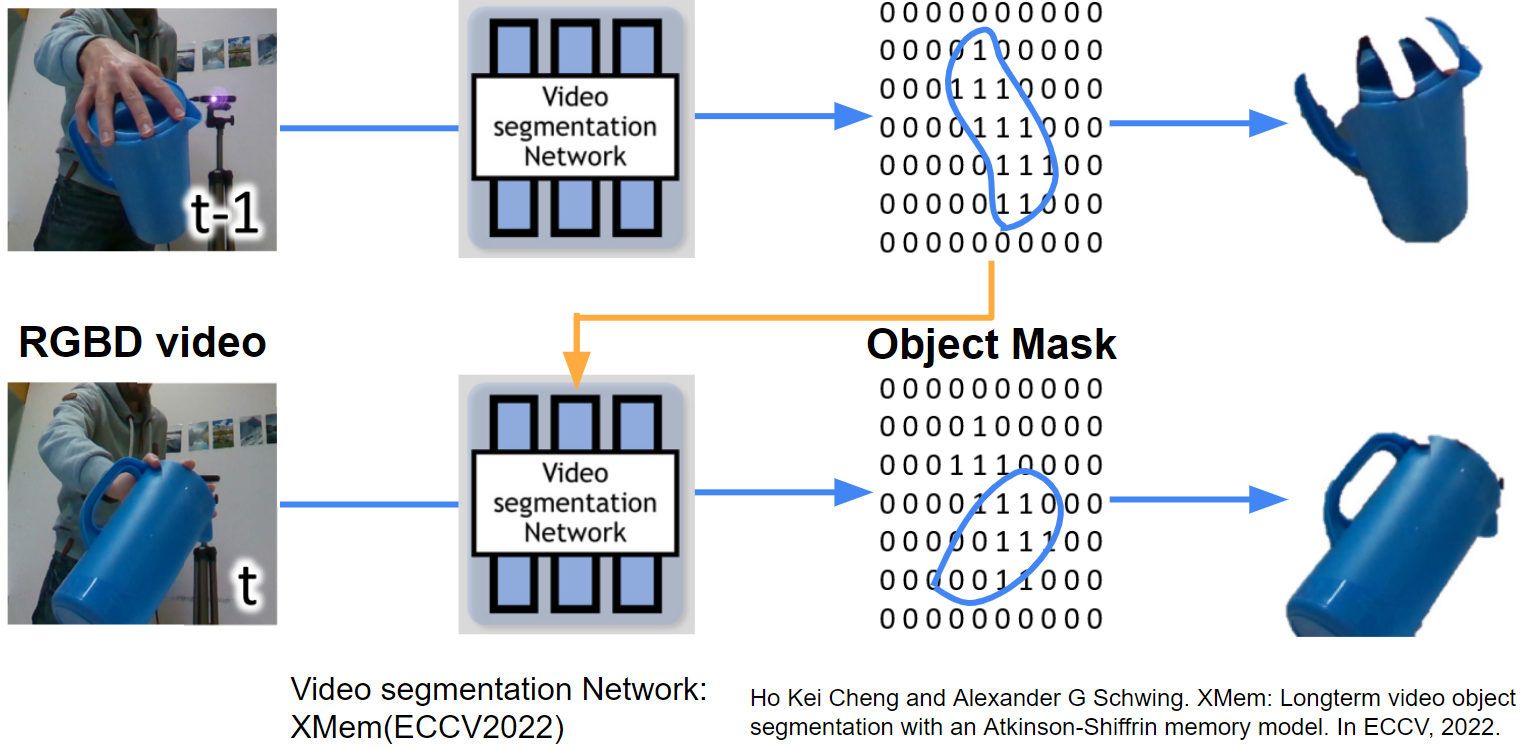
2.1.1. Object Extraction
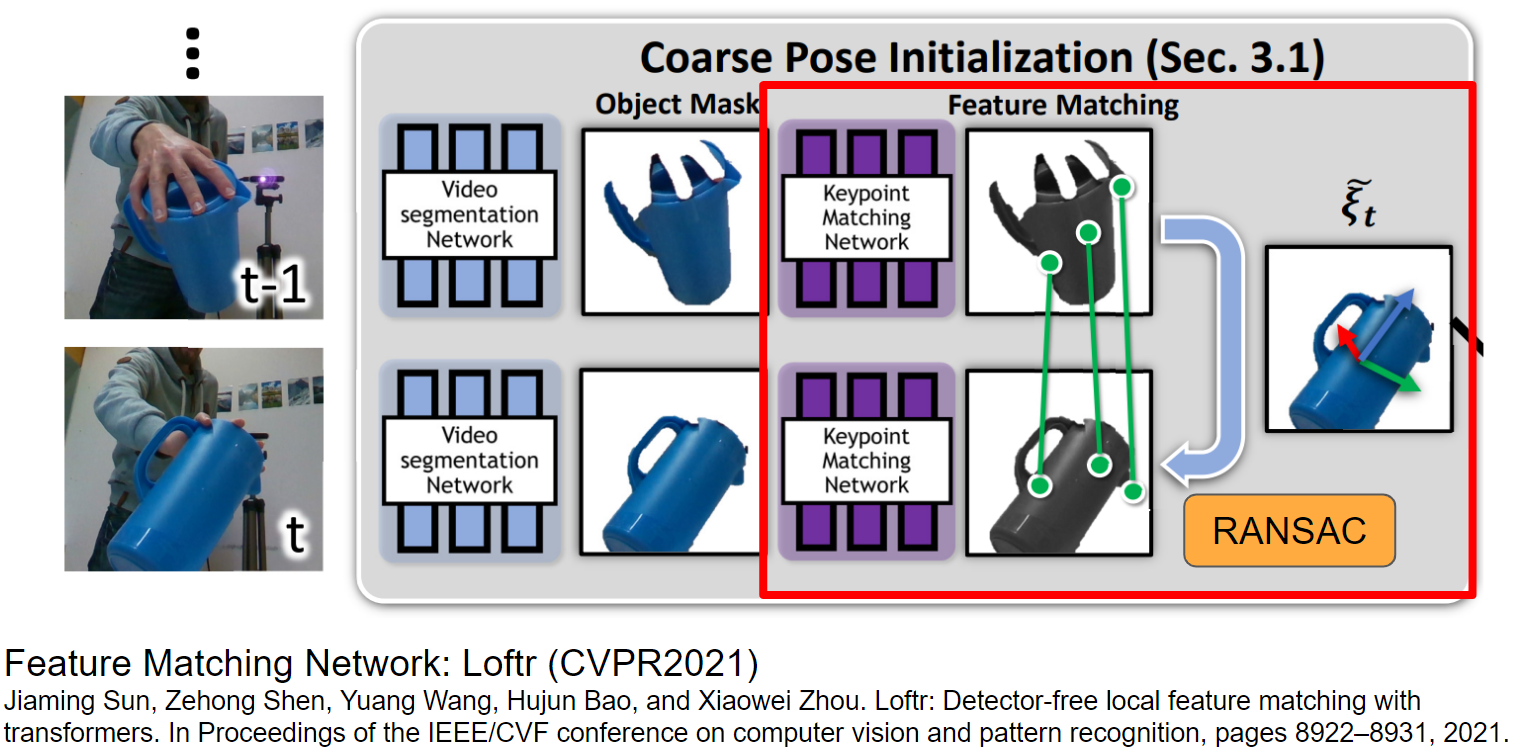
2.1.2. RANSAC Pose Estimation
2.1.3. Memory Pool
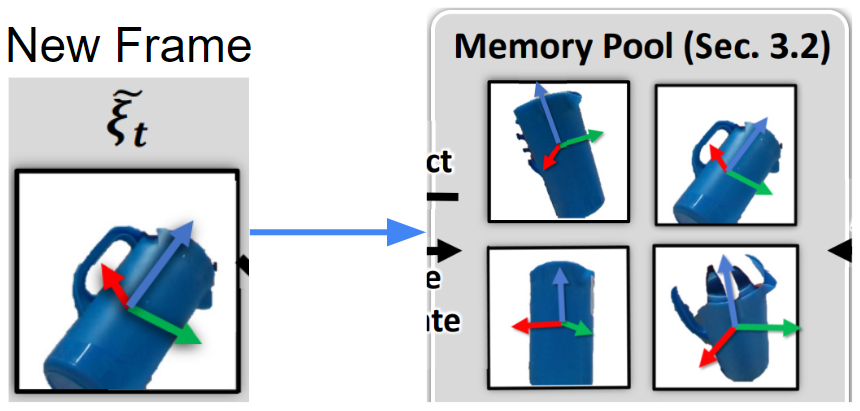
- Stores keyframes
- Minimizes the long-term pose drift using past keyframes
- Keyframe: Stores RGBD image and estimated pose
2.1.4. Pose Graph Optimization
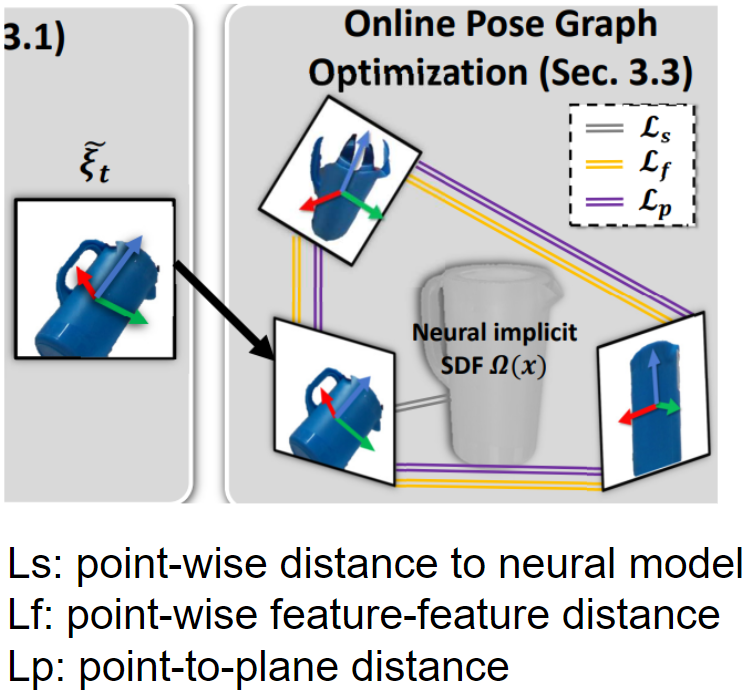
- 1. Select K memory frames with the maximum viewing overlap
- 2. Solve the entire pose graph optimization via the Gauss-Newton algorithm with iterative re-weighting
- 3. Update both new keyframe and K memory frames
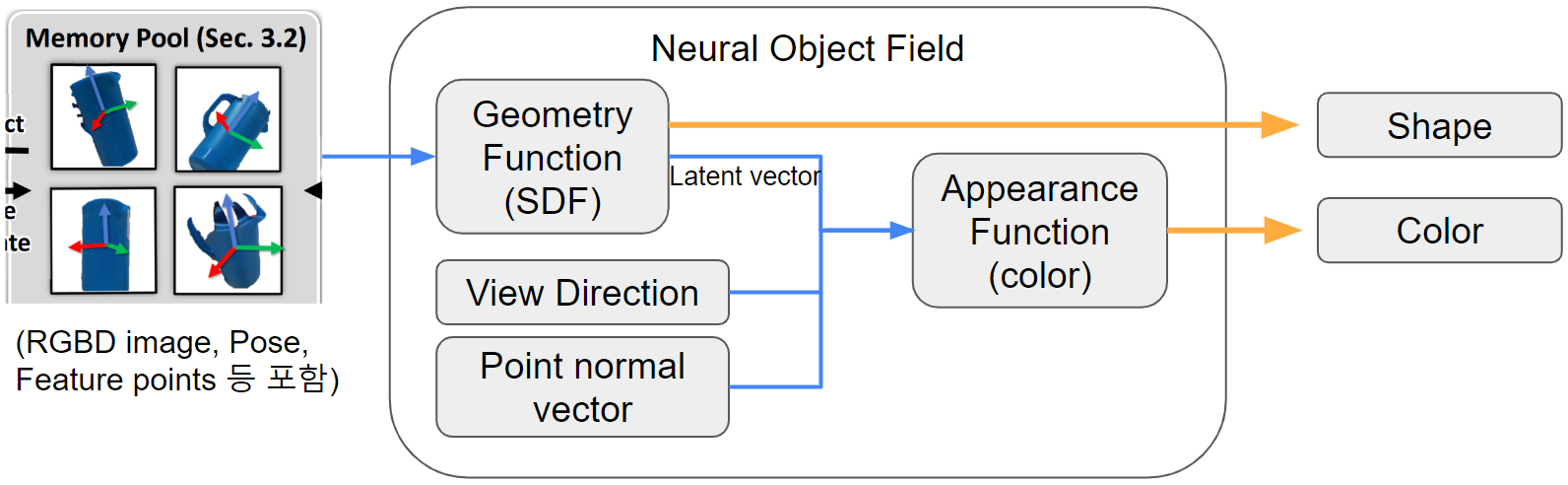
2.2. 3D Reconstruction - Neural Object Field
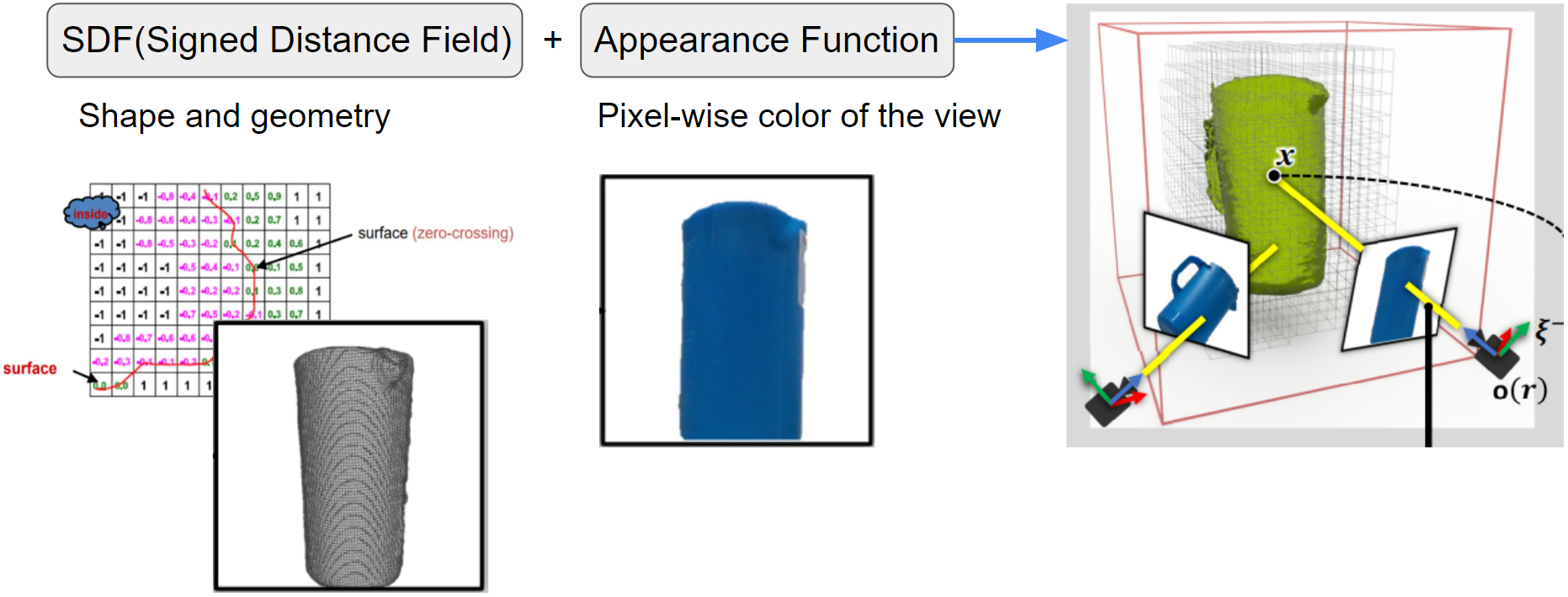
2.3. Rendering
Efficient Ray Sampling & Hybrid SDF Modeling
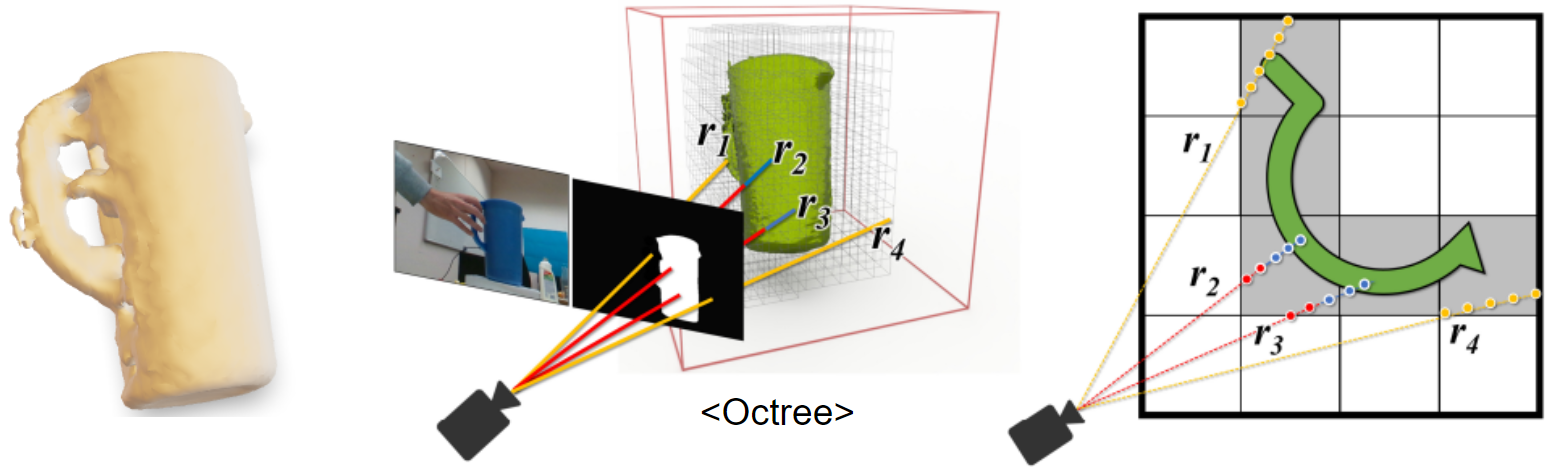
Sample points only within a certain range from the surface of the model. Divide the space into 3 types:
- Yellow: uncertain free space
- Red: empty space
- Blue: near-surface space
Neural Object Field Training Loss

3. Metrics
6-DoF Pose Estimation
ADD(-S): Average Distance of the estimated pose to the ground truth pose
$\text{ADD}(\hat{T}, T) = \frac{1}{N} \sum_{i=1}^N \min_{\hat{R}, \hat{t}} \| \hat{R} x_i + \hat{t} - (R x_i + t) \|_2$
$\text{ADD-S}(\hat{T}, T) = \frac{1}{N} \sum_{i=1}^N \min_{\hat{R}, \hat{t}} \| \hat{R} x_i + \hat{t} - (R x_i + t) \|_2 + \min_{\hat{R}, \hat{t}} \| \hat{R}^{-1} x_i + \hat{t} - (R x_i + t) \|_2$
3D Reconstruction
Chamfer Distance: Calculate distance between the vertices of result mesh and the ground truth mesh
$\text{CD}(M, \hat{M}) = \frac{1}{|M|} \sum_{x \in M} \min_{y \in \hat{M}} \|x - y\|_2 + \frac{1}{|\hat{M}|} \sum_{y \in \hat{M}} \min_{x \in M} \|x - y\|_2$