Overview
지금까지 뉴럴 네트워크의 구성 요소와 학습 방법에 대해 알아보았다. 이번 강의에서는 뉴럴 네트워크의 학습에 필요한 구체적인 방법론들에 대해 알아보도록 하자. 크게 아래의 세 가지로 분류할 수 있다.
- One time setup
- Activation functions
- Data preprocessing
- Weight initialization
- Regularization
- Training dynamics
- Learning rate schedules
- Hyperparameter optimization
- After training
- Model ensembles
- Transfer learning
- Large-batch training
이번 강의에서는 1. One time setup에 대해 알아본다. Training 전에 어떻게 네트워크를 세팅할 것인지에 대한 부분이다.
Activation functions
Activation function의 종류는 아래 그림과 같이 Sigmoid, tanh, ReLU, Leaky ReLU, ELU, GELU 등이 있다.
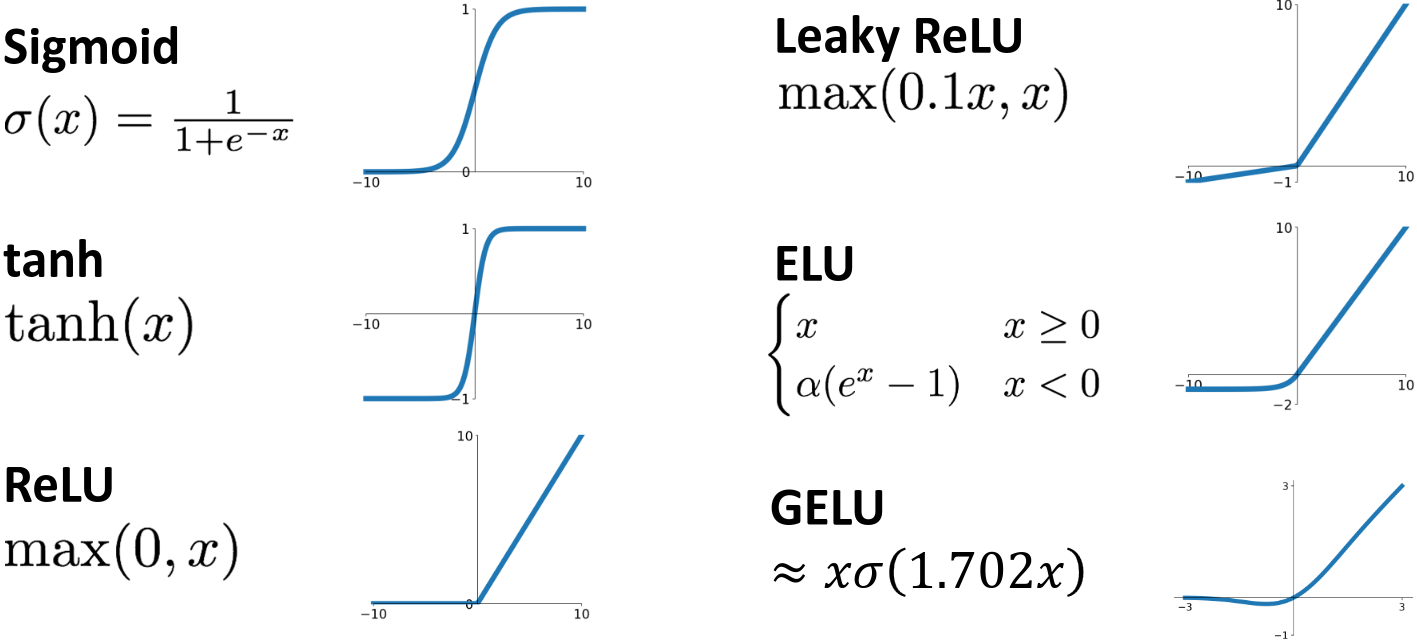
Sigmoid
Sigmoid 함수는 아래와 같이 정의된다.
$f(x) = \cfrac{1}{1 + e^{-x}}$
Sigmoid는 입력값을 (0, 1)의 범위 안에 압축시키는 효과가 있다. 이를 통해 모델의 출력을 확률 형태로 표현할 수 있다는 특징이 있다. 하지만 Sigmoid는 여러 단점을 가지고 있어 오늘날 거의 사용되지 않는다.
첫 번째 단점으로는, Sigmoid는 saturate하는 경향이 있다. 즉, 입력값이 크거나 작을 때 각각 1과 0으로 수렴하기 때문에 gradient가 0에 가까워지는 문제가 발생한다. 이를 Vanishing Gradient Problem이라고 한다.
$\cfrac{\partial L}{\partial x} = \cfrac{\partial \sigma}{\partial x} \cdot \cfrac{\partial L}{\partial \sigma}$
위와 같이 backpropagation이 진행될수록 0에 가까운 gradient $\frac{\partial \sigma}{\partial x}$가 점점 곱해지기 때문에 결국 초반 layer들은 gradient를 제대로 받지 못하게 된다. 이로 인해 앞쪽은 학습이 잘 되지 않는 문제가 발생한다. 이를 vanishing gradient problem이라고 한다. 결국 앞쪽이 잘 학습되어야 뒤쪽이 의미가 있기 때문에 이는 모델의 성능에 심각한 영향을 미친다.
$\cfrac{\partial L}{\partial w} = \cfrac{\partial \sigma}{\partial w} \cdot \cfrac{\partial L}{\partial \sigma}$
두 번째 단점으로는, Sigmoid는 zero-centered하지 않다는 점이다. 아래 수식은 $w$에 대한 gradient를 구하는 과정인데, 중간 변수로 $\sigma(wx)$ 대신 $wx$를 사용하여 전개하였다.
$\begin{align*} \cfrac{\partial L}{\partial w} & = \cfrac{\partial (wx)}{\partial w} \cdot \cfrac{\partial L}{\partial (wx)} \\ & = x \cdot \cfrac{\partial L}{\partial (wx)} \end{align*}$
즉 $w$에 대한 gradient는 이전 레이어로부터의 입력 $x$와 upstream gradient에 의해 결정되는데, Sigmoid는 항상 양수이기 때문에 $x$의 모든 element가 양수가 되고, 결국 $\frac{\partial L}{\partial (wx)}$의 부호에 따라 $w$의 모든 element가 같은 방향으로 업데이트된다. 이는 모델의 학습을 더 어렵게 만드는 요인이 된다.
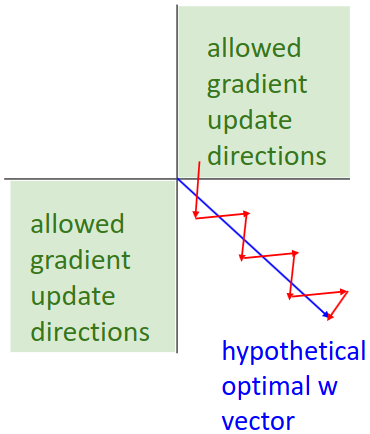
위 그림은 $w_1$과 $w_2$를 각 축으로 하여 $w$의 변화를 화살표로 나타낸 것인데, $\nabla w_1$과 $\nabla w_2$가 항상 같은 부호를 가져야 하는 경우 $\nabla w$는 항상 1사분면 또는 3사분면을 향하고 있을 수밖에 없다. 따라서 $w$는 한번에 파란색 화살표처럼 2사분면 또는 4사분면 방향으로 이동할 수 없고 빨간색 화살표처럼 지그재그 형태의 경로로 이동할 수밖에 없다. 이로 인해 optimization이 느려지는 문제가 발생하게 된다.
다만 실제 training은 mini-batch로 진행되기 때문에 여러 방향의 gradient가 합쳐져 실제로는 모든 방향의 gradient를 표현할 수 있고, 또한 Batch Normalization을 사용하여 해결할 수 있기 때문에 심각한 문제는 아니다.
세 번째 작은 단점으로는 지수함수가 다른 연산보다 연산량이 많다는 점인데, activation function은 conv layer나 FC layer에 비교하면 연산량이 극히 일부분이기 때문에 큰 문제가 되지 않는다.
Tanh
Tanh 함수는 아래와 같이 정의된다.
$f(x) = \tanh(x) = \cfrac{e^x - e^{-x}}{e^x + e^{-x}}$
Tanh 함수는 Sigmoid 함수를 y축 방향으로 단순히 scale과 shift한 것으로, 인풋을 -1과 1 사이의 값으로 압축시킨다. 따라서 zero-centered되어 있다는 장점이 있지만 그 외 특성은 모두 Sigmoid와 동일하다. 따라서 Sigmoid와 마찬가지로 오늘날 거의 쓰이지 않는다.
ReLU (Rectified Linear Unit)
ReLU 함수는 아래와 같이 정의된다.
$f(x) = \max(0, x)$
ReLU 함수는 $x$가 양수일 때 saturate하지 않는다는 장점이 있고 연산도 매우 효율적이다. 또한 Sigmoid나 tanh보다 6배 정도 빠르게 수렴한다고 알려져 있다. 다만 ReLU는 zero-centered되어 있지 않으며 모든 출력값이 양수라는 단점도 가지고 있다.
그보다 더 큰 문제는 $x$가 음수일 때 gradient가 0이 되는 문제이다. 이로 인해 출력이 음수인 뉴런의 경우 전혀 학습을 하지 못하는데, 이를 Dead ReLU Problem이라고 한다. 데이터셋의 모든 이미지에 대해 뉴런의 출력값이 음수일 경우 그 뉴런은 어떤 mini-batch를 사용하더라도 전혀 학습하지 못한다. Dead neuron은 연산은 그대로 하지만 의미 있는 출력을 내보내지 못해 연산량의 낭비를 가져온다. 하지만 Batch Normalization 등을 사용하기 때문에 이 문제는 실제로는 잘 발생하지 않는다.
Leaky ReLU
Leaky ReLU 함수는 아래와 같이 정의된다.
$f(x) = \max(\alpha x, x)$
Leaky ReLU는 ReLU의 Dead ReLU Problem을 해결하기 위해 나온 함수로, $x$가 음수일 때 gradient가 0이 되는 문제를 해결한다. $\alpha$는 일반적으로 0.1로 설정한다. $x$가 음수일 때에도 gradient가 0이 되지 않기 때문에 saturate되거나 Dead ReLU Problem이 발생하지 않는다.
Leaky ReLU의 한 가지 변형으로 Parametric ReLU가 있다. 이는 $\alpha$를 학습 가능한 파라미터로 설정한 것인데, backpropagation을 통해 최적의 $\alpha$를 찾는다.
ELU (Exponential Linear Unit)
ELU 함수는 아래와 같이 정의된다.
$f(x) = \begin{cases} x & \text{if } x > 0 \\ \alpha (e^x - 1) & \text{if } x \leq 0 \end{cases}$
ELU는 ReLU의 형태와 유사하지만 음수 부분을 부드럽게 만든 함수이다. ReLU의 장점을 그대로 가지며, 추가적으로 output의 평균을 조금 더 0에 가깝게 할 수 있으며 noise에 조금 더 robust하다. 다만 음수에서 saturate하며 지수함수 연산이 있기 때문에 ReLU보다 연산량이 많은 편이라는 단점이 있다.
SELU (Scaled Exponential Linear Unit)
SELU 함수는 아래와 같이 정의된다.
$f(x) = \begin{cases} \lambda x & \text{if } x > 0 \\ \lambda\alpha (e^x - 1) & \text{if } x \leq 0 \end{cases}$
$\alpha = 1.673263242354..., \quad \lambda = 1.050700987355...$
SELU는 ELU의 scale된 버전이다. ELU와 비슷하지만 $\alpha$와 $\lambda$가 위의 특정 값일 때 "Self-Normalizing"되는 특성을 가지는데, 이는 Batch Normalization 없이도 깊은 네트워크를 트레이닝할 수 있게 하는 특성이다. 하지만 실제로 잘 사용되는 activation function은 아니다.
GELU (Gaussian Error Linear Unit)
GELU 함수는 아래와 같이 정의된다.
$\begin{gather} X \sim N(0, 1) \\ f(x) = xP(X \leq x) = \cfrac{x}{2}(1 + \text{erf}(\cfrac{x}{\sqrt{2}})) \end{gather}$
이때, $X$가 Gaussian 분포를 따르므로 $x$가 클수록 $P(X \leq x)$는 1에 가까워질 것이고 작을수록 0에 가까워질 것이다. 따라서 ReLU와 비슷하면서도 부드러운 곡선의 형태를 가진다. Transformer에서 주로 사용된다.
GELU의 한 가지 특징으로는 non-monotonic하다는 점인데, 즉 $x$가 음수일 때 그래프가 아래로 튀어나온 부분이 있다. 따라서 두 개의 $x$값이 동일한 출력을 내는 경우가 생긴다. 이 경우, 그 다음 node가 원래 입력이 정확히 무엇인지 모른 채로 추론을 진행해야 하므로 약간의 stochasticity를 가진다. 이를 통해 약간의 regularization 효과를 얻을 수 있다.
Activation Function Summary
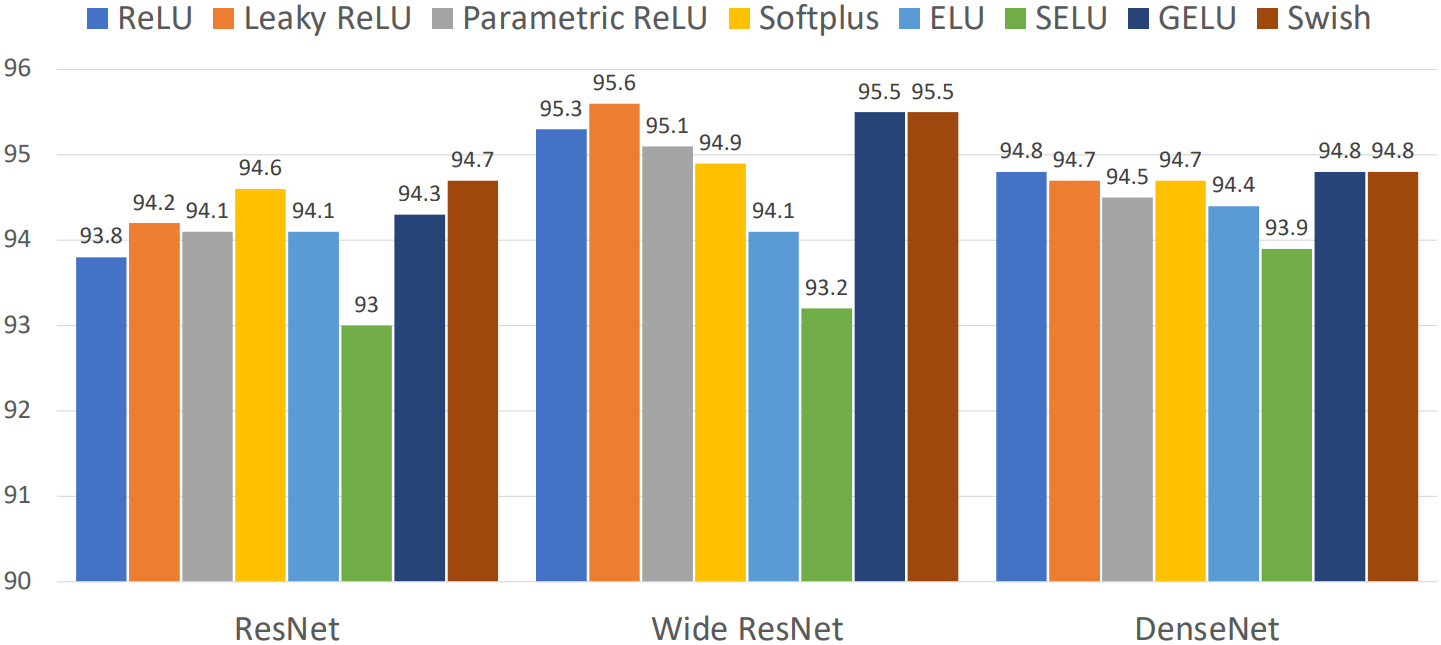
위 그림은 각 activation function의 성능을 여러 모델에서 비교한 결과이다. 이때, 수치를 보면 Sigmoid와 tanh를 제외하면 어떤 activation function을 쓰더라도 차이가 1~2퍼센트 이상 크지 않다. 따라서 activation function을 고르는 데 시간을 너무 많이 쓰기보다는 ReLU를 사용하여 우선 진행하고, 최종적으로 마지막 0.1%의 성능을 끌어내야 할 때 여러 activation function을 비교하는 것이 좋다.
Data Preprocessing
Data preprocessing은 데이터를 네트워크에 입력하기 전에 적절히 가공하는 과정을 말한다. 이는 데이터의 품질을 높이고 학습 속도를 높이는 데 도움을 준다. 대표적으로 zero-centering과 normalizing이 있다.
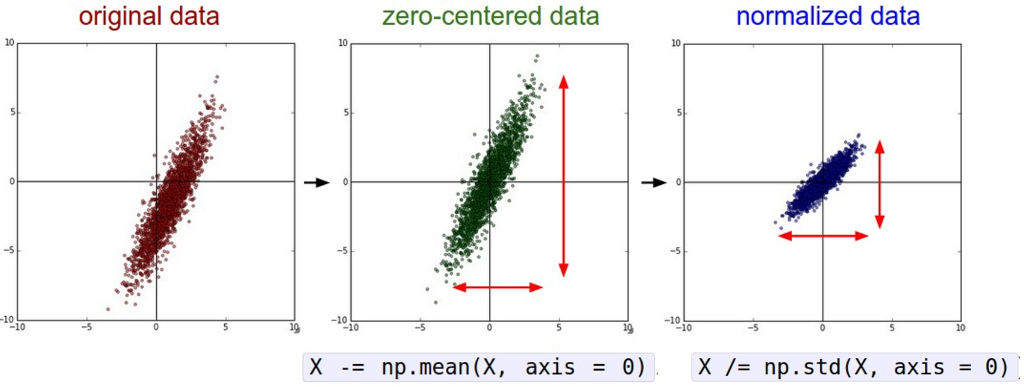
Zero-centering은 데이터에서 평균값을 빼줌으로써 새로운 평균을 0으로 만드는 과정이다. 위 그림과 같이 데이터를 평행이동시키는 것으로 볼 수 있다. Normalizing은 데이터의 표준편차를 1로 만들어주는 과정이다. 이러한 과정을 거치는 이유는, 위 sigmoid 설명 부분에서 언급했듯 데이터가 전부 양수이거나 음수일 경우 optimization이 원활히 되지 않을 수 있기 때문이다. 이 이유는 zero-centered된 activation function을 사용해야 하는 이유, batch normalization을 사용해야 하는 이유와 동일하다. Batch normalization과의 차이점은, Data preprocessing 과정에서는 mini-batch가 아닌 전체 데이터셋을 대상으로 평균과 표준편차를 계산한다는 것이다.
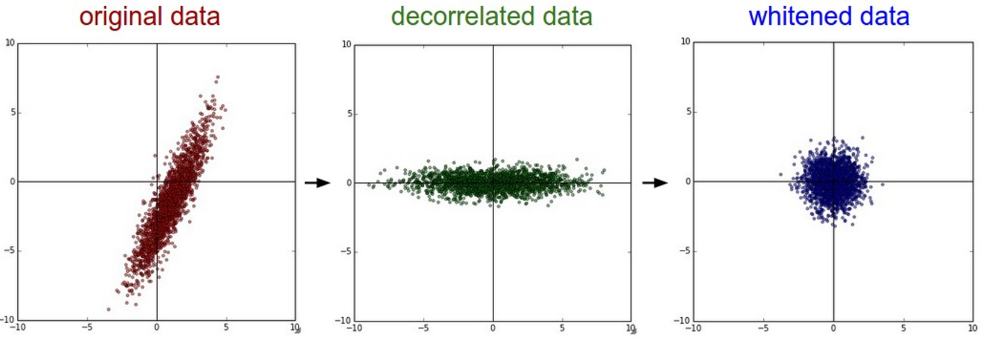
이미지에서는 잘 사용되지 않지만 다른 종류의 데이터에서 사용되는 PCA와 whitening이라는 과정도 있다. PCA를 통해 데이터의 각 채널간 correlation을 줄이고, whitening을 통해 각 채널의 분산을 1로 만들어주게 된다.
평균과 표준편차를 구하는 방식으로는, 우선 각 이미지의 픽셀별로 평균을 구하는 방법이 있다. 즉 인풋 이미지의 크기가 [32, 32, 3]이라면 평균 이미지의 크기도 [32, 32, 3]이 된다. 이렇게 구한 평균 이미지를 모든 이미지에서 빼주면 zero-centering이 된다. 이 방법은 AlexNet에서 사용된었다. 다른 방법으로, 채널별로 평균과 표준편차를 구하는 방법이 있다. 따라서 인풋 이미지가 [32, 32, 3]이라면 평균은 크기가 3인 벡터가 된다. 이 방법은 VGG와 ResNet에서 사용되었고, 최신 모델들에서도 주로 사용된다.
Weight Initialization
Weight initialization은 optimization 시작 전 가중치를 어떻게 초기화할 것인지에 대한 문제이다. 가중치를 모두 같은 값으로 초기화할 경우 gradient 또한 모두 같을 것이기 때문에 서로 다른 값으로 초기화해주는 것이 필요하다. 그래서 보통 가우시안 분포를 이용하여 초기화를 진행하는데, 이때 가중치 $W$의 분산을 적절히 설정하는 것이 중요하다.


위 그림은 activation function을 tanh로 설정하고 $W$의 분산을 작거나 큰 값으로 설정했을 때 각 레이어의 출력의 분포를 나타낸다. 각 뉴런에서는 $f = \mathbf{W} \cdot \mathbf{x}$ 연산을 계속해서 수행하기 때문에 $W$가 0에 너무 가깝게 초기화되면 layer가 깊어질수록 각 뉴런의 출력이 0으로 수렴하고, 반대로 큰 값들로 초기화되면 출력이 커져서 1로 수렴하게 된다. 첫 번째 경우에는 각 layer에 대한 gradient $\frac{\partial L}{\partial w}$가 0에 가까워지고, 두 번째 경우에는 local gradient $\frac{\partial \text{tanh}(x)}{\partial x}$가 0에 가까워져 결국 downstream gradient가 0으로 수렴하는 문제가 발생한다. 따라서 각 layer에서의 출력이 한쪽으로 수렴하지 않도록 유지시켜줄 수 있는 적절한 $W$의 분산을 찾아야 한다.
Xavier Initialization
Tanh activation function을 사용할 경우, 아래 수식을 통해 $W$의 분산을 찾을 수 있는데 이를 Xavier initialization이라고 한다.
$W \sim N(0, \ \sigma^2), \quad \sigma = \cfrac{1}{\sqrt{D_{in}}}$
이때 $D_{in}$은 이전 레이어의 뉴런의 개수이다. 따라서 FC layer에서는 $D_{in}$이 input의 차원들을 모두 곱한 값이 되고, Conv layer에서는 $D_{in}$이 kernel 크기의 제곱에 채널의 개수를 곱한 값이 된다. 그 결과, 아래와 같이 layer가 깊어지더라도 각 layer의 출력의 분포가 일정하게 유지되는 것을 확인할 수 있다.

He Initialization
ReLU activation function을 사용할 경우, 아래 수식을 통해 $W$의 분산을 찾을 수 있는데 이를 He initialization이라고 한다.
$W \sim N(0, \ \sigma^2), \quad \sigma = \sqrt{\cfrac{2}{D_{in}}}$


위 두 이미지는 ReLU activation function을 사용할 경우 $W$의 분산을 작게 설정했을 때와, He initialization을 사용하여 적절한 값으로 설정했을 때의 각 layer의 출력의 분포를 보여준다. He initialization을 통해 ReLU에서도 각 layer의 출력의 분포를 일정하게 유지할 수 있다는 것을 알 수 있다.
Residual Network Initialization
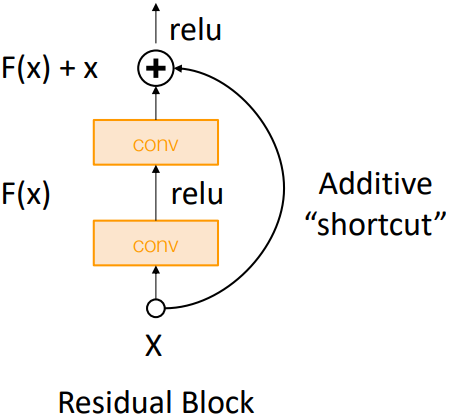
위와 같은 residual block의 경우, 처음 conv layer만 He initialization으로 초기화하고 두 번째 layer는 모두 0으로 초기화하는 방식을 사용한다. 이 방식을 통해 각 residual block의 출력의 분포를 일정하게 유지할 수 있다.
$std(x) = std(F(x) + x)$
Regularization
Regularization은 overfitting을 방지하기 위한 방법이다. Loss function에 적용할 수 있는 L1, L2 regularization에 대해 이전 강의에서 살펴보았고, neural network에서 주로 사용되는 Dropout이라는 방법도 있다. 보편적인 regularization의 패러다임은, training 시에 약간의 randomness를 더하여 모델이 overfitting되지 않도록 하고, test 시에는 그 ramdomness를 모두 평균내어 deterministic한 결과를 내도록 하는 것이다. Batch Normalization도 이에 해당된다.
Dropout
Dropout은 forward pass 과정에서 매 mini-batch마다 각 뉴런을 일정 확률로 deactivate하는 방법이다. 뉴런의 출력을 일정 확률로 0으로 만드는 방식으로 구현한다. 확률은 0.5를 주로 사용한다.
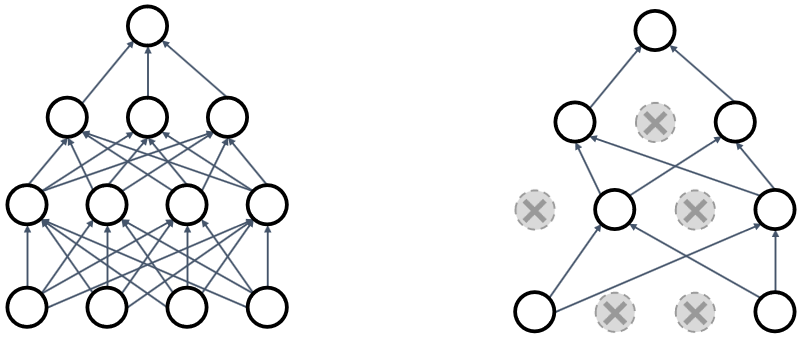
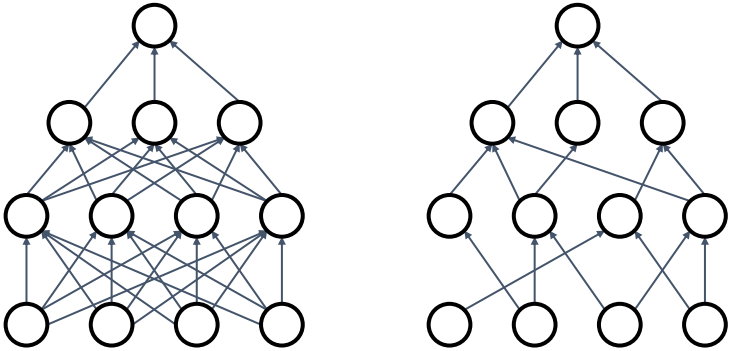
Dropout이 효과적인 이유는 co-adaptation을 방지하기 때문이다. 즉, 각각의 뉴런들이 겹치지 않게 서로 다른 특징을 학습하게 할 수 있다. Co-adaptation이 문제가 되는 이유는, 여러 개의 뉴런이 동일한 특징을 학습할 이유가 없기 때문이다. 이는 단순히 연산량 소모로 이어져 뉴럴 네트워크가 100%의 성능을 내지 못하게 한다.
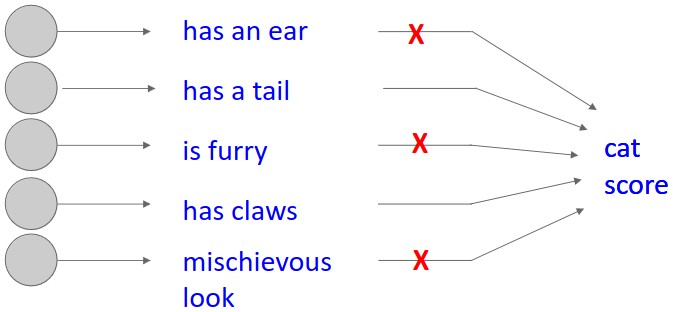
예를 들어, 고양이 사진을 입력으로 주었을 때 각 뉴런은 귀, 꼬리, 털 등의 특징을 학습할 수 있는데 이때 각 특징별 학습 속도가 다를 수 있다. Loss function은 모든 뉴런의 성능을 종합하여 loss를 계산하기 때문에 한 뉴런의 성능이 상대적으로 떨어질 경우 그 뉴런뿐 아니라 다른 뉴런들까지 그 특징을 함께 학습해서 성능을 보완하려는 경향이 생긴다. 결국 배우고자 하는 특징들이 희석되어 여러 뉴런이 비슷한 특징을 학습하게 된다.
Training 동안 dropout을 통해 이를 해결할 수 있는데, dropout된 뉴런이 찾는 특징이 loss에 영향을 주지 않기 때문에 다른 뉴런의 학습에 영향을 주지 않으며, gradient update도 이루어지지 않기 때문에 다른 뉴런들에 영향을 받지도 않는다. 이를 통해 각 뉴런이 co-adaptation을 점점 줄여나가고 독립적으로 특징을 학습할 수 있게 된다.
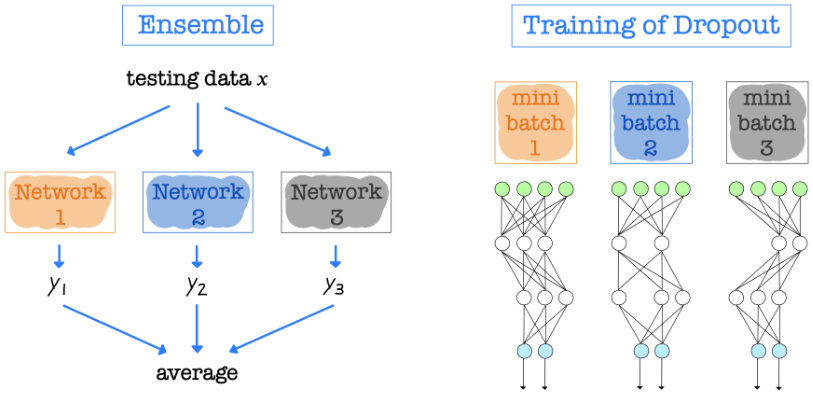
Dropout의 또 다른 해석으로는 ensemble이 있다. Ensemble은 하나의 네트워크를 사용하는 것보다 여러 네트워크를 사용하고 그 결과를 종합하여 최종 결과를 내는 것이 더 정확할 수 있다는 것이다. Dropout은 매 iteration마다 각각 다른 thinned network를 사용하기 때문에 여러 네트워크를 학습시키고 그 결과를 평균내는 것과 비슷한 효과를 낸다고 볼 수 있다.
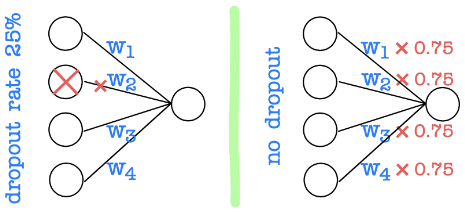
Test time에서는 dropout을 사용하지 않는다. 대신, 위 그림과 같이 최종 출력값에 dropout하지 않을 확률 0.75를 곱해주는 방식으로 scaling을 보정해주게 된다. 그 이유는 training 시에 dropout되지 않은 뉴런들만으로 결과값을 만들어냈으므로, 전체 뉴런들로 결과값을 만들어내면 증가된 뉴런의 수만큼 결과값이 커질 것이기 때문이다. 이를 방지하기 위해 dropout probability를 곱해 주어야 한다. 그 결과, test 시에는 모든 thinned network의 평균을 취해 하나의 유일한 네트워크를 만들어내는 것으로 해석할 수 있다.
$\begin{align*} E_{train} & = \cfrac{1}{4} (w_1x + w_2y) + \cfrac{1}{4} (w_1x + 0y) + \cfrac{1}{4} (0x + w_2y) + \cfrac{1}{4} (0x + 0y) \\ & = \cfrac{1}{2} (w_1x + w_2y) \\ E_{test} & = w_1x + w_2y \end{align*}$
위 수식은 dropout probability가 0.5일 때의 경우이다. 수학적으로 output의 기대값을 구해 보아도 training 시에는 0.5배가 되어 있지만 test 시에는 그대로 출력되는 것을 확인할 수 있다.
다만, 실제 구현 시에는 test time에 keeping probability를 곱해주는 대신 training 시 뉴런의 output에 keeping probability를 나눠주는 방식으로 구현된다. 이를 Inverted Dropout이라고 한다.
Dropout은 FC layer에 주로 사용되고, FC layer가 없는 GoogLeNet이나 ResNet은 dropout을 사용하지 않는다.
Q: Dropout은 training을 더 빠르게 만드는가?
A: 오히려 느리게 만든다. Stochastic한 종류의 regularization은 모두 training을 어렵게 만든다. 다만 test 시
성능을 높여 주기 때문에 사용할 가치가 있다.
Q: Dropout을 conv layer에도 적용할 수 있는가?
A: Conv layer에서는 dropout 자체를 잘 사용하지 않는데, 사용한다면 채널을 통째로 drop하는 방식을 사용한다.
다만 batch normalization과 dropout을 함께 사용하면 dropout으로 인해 출력이 0인 뉴런들이 많아지면서 평균과
분산이 정상적이지 않은 값으로 나올 수 있기 때문에, dropout 자체를 잘 사용하지 않는다.
Data Augmentation
Train 시에 randomness를 더하고 test 시에 이 ramdomness를 모두 평균내어 deterministic한 결과를 내는 것을 regularization이라고 생각한다면, Data Augmentation도 regularization의 일종이다. Data Augmentation은 training 데이터를 random하게 변형시키는 방식으로 네트워크의 overfitting을 개선한다. 인풋 이미지를 네트워크에 넣기 전에 Data Augmentation를 진행하여, 같은 label을 가진 여러 장의 변형된 이미지를 네트워크에 학습시키는 것이다. 이를 통해 데이터셋의 크기을 늘리는 효과도 얻을 수 있다. Data Augmentation의 여러 방법에 대해 알아보자.
Horizontal Flips
단순히 좌우를 반전시키는 것이다.
Random Crops and Scales
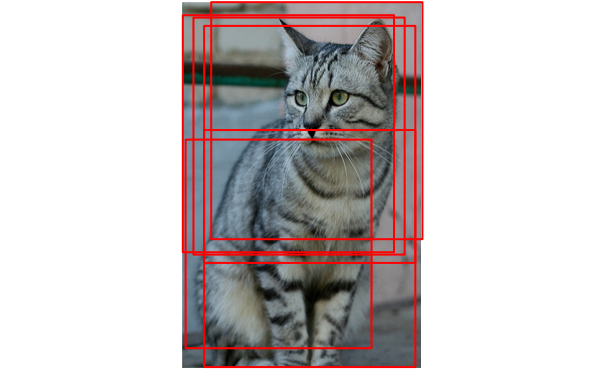
이미지 내 다양한 위치에서 다양한 크기로 crop하는 것이다. 이를 통해 물체의 일부분만 바라보더라도 올바른 물체로 인식할 수 있도록 한다. 또한 Horizontal Flips과 Random Crops and Scales의 경우 test 시에도 적용할 수 있는데, test 이미지에 대해 정해진 위치에서 정해진 크기로 여러 장의 이미지를 flip 및 crop한 후 각각에 대한 결과를 내고, 그 결과를 평균내어 최종 결과를 내는 방식으로 사용할 수 있다. 이때 각 변형된 이미지별 각 클래스에 속할 확률이 계산될 텐데, 이 확률 분포 자체를 평균낸 후 가장 확률이 높은 클래스를 선택하는 방식이다. 이 방식은 실제로 성능에 도움이 되지만, 연산량이 많아지기 때문에 inference 시에는 잘 사용하지 않는다.
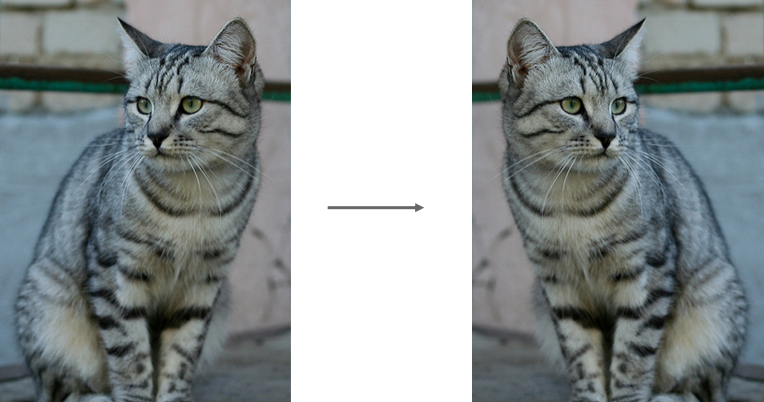
Color Jitter

이미지의 색상을 변화시키는 것이다. 단순한 방법으로는 밝기나 대비를 변화시키는 방법이 있고, 더 복잡한 방법으로는 RGB 채널을 변화시키는 방법이 있다. 전체 데이터셋의 RGB 채널에 대해 PCA를 적용하고, 각 principal component direction에 대해 offset 값을 구한 뒤 이를 이미지의 각 채널에 더하는 방식이다. 이를 통해 물체의 색상이 변화해도 올바르게 인식할 수 있도록 한다.
이처럼 다양한 Data Augmentation 방법들은 모두 모델의 invariance를 가져온다. 즉 데이터에 변형이 있더라도 그 결과가 변하지 않도록 한다. 따라서 Data Augmentation 방법을 선택할 때는 "데이터를 어떻게 변형했을 때 그 결과가 변하지 않을지"를 고민해야 한다.
DropConnect
위에 언급한 Dropout, Data Augmentation 외에도 다양한 regularization 방법이 있다. 그 중 하나가 DropConnect인데, 뉴런 자체를 deactivate하는 대신 각 weight를 deactivate하는 방식이다. Random하게 weight를 0으로 만들어주는 방식으로 구현된다. Test 시에는 모든 weight를 사용한다.
Fractional Pooling
Fractional Pooling은 pooling layer에서 일정한 크기로 pooling하는 것이 아니라 random하게 pooling하는 방식이다. 이를 통해 pooling layer에서도 randomness를 더할 수 있다. Test 시에는 training 시에 사용한 pooling 영역 크기의 평균을 사용한다. 다만 실제로 많이 사용되지는 않는 방법이다.
Stochastic Depth
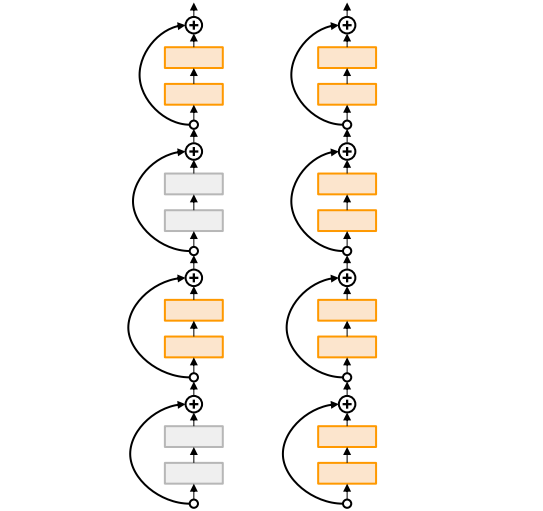
Stochastic Depth는 ResNet에서 사용되는 방법으로, 일정 확률로 residual block 자체를 deactivate하는 방식이다. Test 시에는 모든 residual block을 사용한다.
Cutout
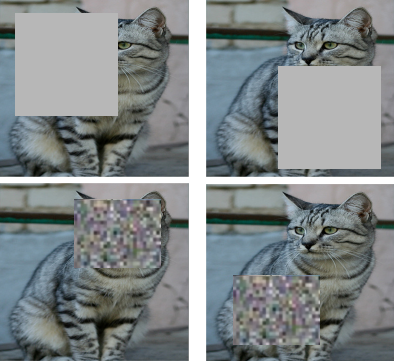
Cutout은 이미지의 일부분을 random하게 0으로 만들어 지워버리는 방식이다. 이를 통해 네트워크가 물체의 일부분만으로도 물체를 인식할 수 있도록 한다. Test 시에는 지우지 않은 원본 이미지를 사용한다.
Mixup
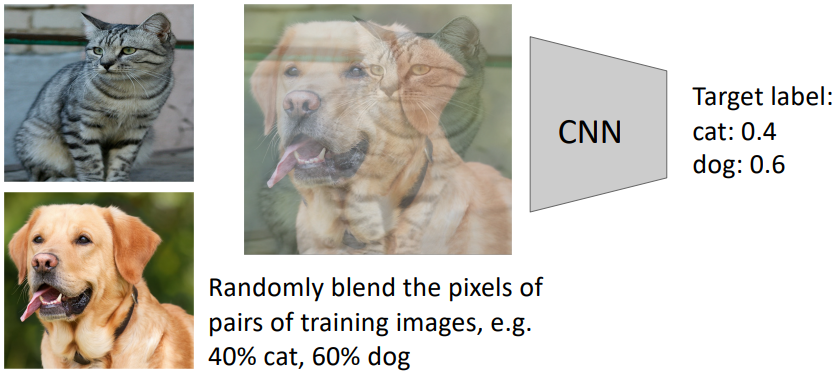
Mixup은 두 이미지를 섞어서 새로운 이미지를 만들어내는 방식이다. 이를 통해 네트워크가 두 이미지의 특징을 모두 학습할 수 있도록 한다. 이미지 픽셀을 섞는 비율에 따라, 정답 label도 one-hot encoding이 아닌 비율에 따른 확률 분포를 사용한다. Test 시에는 원본 이미지를 사용한다.
CutMix
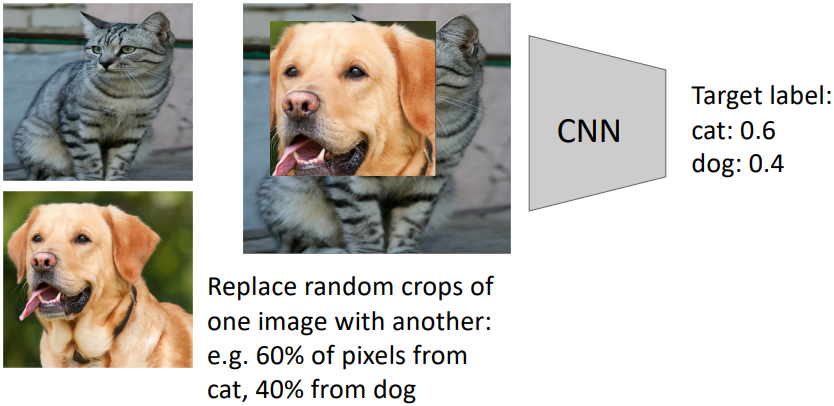
CutMix는 이미지의 일부분을 다른 이미지로 대체하는 방식이다. 이를 통해 네트워크가 물체의 일부분만으로도 물체를 인식할 수 있도록 한다. Mixup과 비슷한 방식이지만 이미지를 섞는 대신 이미지의 일부분을 대체하는 방식이다. 이미지의 비율에 따라 정답 label도 같은 비율로 설정한다. Test 시에는 지우지 않은 원본 이미지를 사용한다.
Label Smoothing
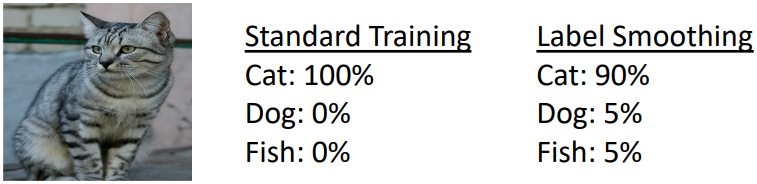
Label Smoothing은 인풋 이미지를 변형시키는 대신 정답 label의 확률 분포를 변형시킨다. label을 0과 1로만 표현하는 것이 아니라 0과 1 사이의 값으로 표현하는 방식이다. 정답 label의 확률을 $1 - \frac{K - 1}{K}\epsilon$으로, 나머지 label의 확률을 $\frac{\epsilon}{K}$로 설정한다. Hyperparameter인 $\epsilon$이 정답 label의 확률을 얼마나 줄여서 나머지 label에 분산할지를 결정한다. 이는 앞서 언급한 다른 regularization과는 달리, training 데이터가 잘못 label되었을 경우를 대비한 방법이다.
Regularization Summary
Dropout은 FC layer에 사용하면 좋고, Data Augmentation은 항상 사용하는 것이 좋다. Conv layer에는 L2와 Batch normalization을 주로 사용한다. 기타 Cutout, Mixup, CutMix, Stochastic Depth, Label Smoothing 등은 최신 모델에서 종종 사용되는 방법으로, 적용해 보면 좋다. DropConnect과 Fractional Pooling은 잘 사용되지 않는다.
위에 언급한 방법들은 모두 regularization의 일종이기 때문에 모델의 overfitting 정도를 보고 그 강도를 결정할 수 있다. 모델이 overfitting된다면 regularization을 더 강하게 적용할 수 있고, 반대로 underfitting된다면 regularization을 약하게 적용해야 한다.